
Nonlinear symbolic LFT model for UAV
2015-04-22 06:17:28TUHaifeng涂海峰LIULi劉莉
TU Hai-feng(涂海峰), LIU Li(劉莉)
(School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China)
?
Nonlinear symbolic LFT model for UAV
TU Hai-feng(涂海峰), LIU Li(劉莉)
(School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China)
A nonlinear modeling framework is presented for an oceanographic unmanned aerial vehicle (UAV) by using symbolic modeling and linear fractional transformation (LFT) techniques . Consequently, an exact nonlinear symbolic LFT model of the UAV is derived in a standardM-ΔformwhereMrepresentsthenominal,known,partofthesystemandΔcontainsthetime-varying,uncertainandnonlinearcomponents.Theadvantagesoftheproposedmodelingapproacharethat:itnotonlyprovidesanidealstartingpointtoobtainvariousfinaldesign-orientedmodelsthroughsubsequentassumptionsandsimplifications,butalsoitfacilitatesthecontrolsystemanalysiswithmodelsofdifferentlevelsoffidelity/complexity.Furthermore,alinearizedsymbolicLFTmodeloftheUAVisproposedbasedontheLFTdifferentiation,whichisamenabledirectlytoasophisticatedlinearrobustcontrolstrategysuchasμ synthesis/analysis. Both of the derived LFT models are validated with the original nonlinear model in time domain. Simulation results show the effectiveness of the proposed algorithm.
nonlinear symbolic modeling; linear fractional transformation; unmanned aerial vehicle
Unmanned aerial vehicle (UAV) has received an increasing attention with their civil and military applications in recent years especially as low-cost UAV platforms[1].
A number of design challenges must be met as a result of the low-cost requirements. The reduced dimensions of the vehicles lead to highly nonlinear system behaviors and unconventional performance, which means that small UAV flight dynamics is less well understood than full size aircrafts. Furthermore, other indeterminacies like uncertain actuator responses, time delays, center of gravity shifts and mass variations also contribute to system uncertainties. Therefore, the design of a flight control law with adequate robustness plays a key role to compensate system against parameter variations.
The linear fractional transformation (LFT)[2]is introduced as a modeling framework associated with modern robust control methodology over the last twenty years. LFT is a special kind of representation for systems whose transfer behavior is assumed to be uncertain and/or varying. In this form the known or invariant parts, often abbreviated byM,areseparatedfromtheuncertainorvariablepartswhicharesummarizedandstackedtogetherinthesocalled“perturbation”matrixΔ.
Normally,LFTsarerestrictedtorepresentlinearsystemwiththeeaseofperformingstructuredsingularvaluetheoryforrobustnessassessment.However,itisstillnecessarytodevelophigh-fidelitynonlinearmodelswhicharecapableofcapturingallthecomplexityoftheplantforthefinalclosed-loopvalidation.Furthermore,aseriesofnonlineardesignsandanalysistechniquesareproducedmorerecentlybasedontheextensionoftraditionallinearapproachestoaddressnonlinearproblems,whichincludegainscheduling,linearparametervarying(LPV)[3]controlandintegralquadraticconstraintsamongothers.
Sincemanyoftheabovetechniquesworkwithmodelsbasedon,orsimilarto,theLFTmodelingparadigm,itisdesirabletodevelopasystematicnonlinearmodelingframeworkbasedonLFTrepresentations,whichofferstheflexibilityandmodularityrequiredtoobtainthesimplifiedmodelsusedforcontrollerdesign,butalsoconnectsthesemodelstotheoriginalandmorecomplexmodelsusedforcertification.RecentproposedanexactnonlinearLFTmodelingapproach[4]andaMATLABbasedtoolboxforLFTgeneration[5]havemadeitanattractiveandpossiblepropositioninaircraftdynamicsmodeling.
ThecontributionofthispaperisthatwedemonstrateasystematicprocedureofnonlinearLFTmodelingforanUAV.Basicstepsforthemodelingapproachareexplainedinmoredetails.TwospecialLFToperationsnamedLFTdifferentiationandnestedLFTsubstitutionarealsohighlighted,whicharenecessarytoperformafurthermanipulationofthenonlinearLFTmodel.Finally,theresultingLFTmodelsarevalidatedviacomparingthesimulationsoftheLFTmodelsintimedomainwithrespecttothatoftheoriginalnonlinearmodel.
1 Nonlinear symbolic LFT modeling approach
1.1 Definition of LFT
LetMbeap×qtransferfunctionmatrixandsupposetherearetwoappropriatelydimensionedblockstructuresΔuandΔlthatrelatetoMasshowninFig.1.SupposethismatrixMispartitionedas
(1)
The upper and lower LFTs are defined as
Fu(M,Δu)=M22+M21Δu(I-M11Δu)-1M12
Fl(M,Δl)=M11+M12Δl(I-M22Δl)-1M21
(2)
Assuming the inverse matrices exist, the LFTs will be called well defined.
An important characteristic of LFTs is that linear interconnection of basic LFTs can be grouped together into a single LFT.

Fig.1 Upper and lower LFT description
1.2 Modeling approach
The general framework of exact nonlinear modeling using symbolic LFT has been presented detailedly in Refs.[4,6]. The core idea is to transform the ordinary differential equations (ODEs) which define the nonlinear system into an exact nonlinear symbolic LFT form. In this manner, the structured ΔmatrixoftheLFTmodelcontainsthenonlinear,time-varyingoruncertaintermsassymbolicparameters.
AssumetheclassofnonlinearsystemsconsideredisdefinedbythefollowingODEs:
y=g(x,u)=g1(x)x+g2(x)u+g3(x)
(3)
wherex,u,yarerespectivelythestate,inputandoutputvectors,thenonlinearfunctionsfi(x), gi(x)aregivenbyapolynomialmixofanalyticexpressionsandtabulardata.Theonlyrequirementfortheclassofsystemsisthelineardependencyofthenonlinearfunctionsontheinputvectoru,whichisquitegeneralformechanicalsystems.Thebasicstepsofthemodelingapproachare:
①Useanonlinearstatespace2×2blockmatrixtorepresenttheODEs.Introducefictitioussignalsuf=1?ttoincludethosenonlineartermsnotaffineontheinputsuorthestatesx:
(4)
②Definealltheuncertain,nonlinearandtimevaryingtermsassymbolicparametersρkanddenoteconstanttermsascj.Heren1, n2, nkindicatethenumberofrepetitionsforeachparameter.
(5)
③PerformthetransformationfromthenonlinearstatespacesymbolicmatrixtononlinearsymbolicLFTwhereallthesymbolicparametersareincludedintheΔ(ρ)matrix.Theessentialideaofthisstepisbasedonthesymbolicmatrixdecompositionalgorithm.
④FouradditionalstagescanbecarriedoutinordertomakeuseofdiagonalstructureofΔ(ρ)arisingfromthepreviousLFTmodelingprocess.Theyaresimplifications,modelreduction,approximationsanduncertaintycharacterization.
Then,amanageableLFTmodelfordesignandanalysisisobtained.Besidethepropertyofnaturalmodularityanddiagonalstructure,anotheradvantageoftheproposedmodelingapproachisthatitiseasilyconnectedwithothermodelsstemmingfromtheoriginalnonlinearsymbolicLFT,whichpreservestheusefulnessofestablisheddesignandanalysistechniques.Forinstance,linearmodelandLPVmodelcanbederivedfromthenonlinearLFTmodelbecausetheyareparticularcasesofthelatterandthen,correspondingdesignandanalysistheoriesareavailable.
2 UAV model description
Inthissection,agenericnonlinearmodelwhichcharacterizestheUAVflightdynamicsisdescribed[7].Theopen-loopnonlinearmodelcanberepresentedbythemainblocksofODEs[8],whichisillustratedinFig.2.

Fig.2 UAV model diagram
Inthediagram,EoMistheequationsofmotionblockwhichcomprisesthetwelvestandardaircraftstates.Theequationscanbewrittenas
(6)
whereFandMaretotalforcesandmomentswhichareconsideredastheinputsoftheEoMblock;V, Ω, Ξ, Ψarethelinearandangularrates,kinematicandnavigationstatesrespectively;TBHandTBEaretransformationmatricesfrombody-axestolocal-horizonandearth-frame;Iistheinertialmatrix; misthemassoftheaircraft.
Theinputsofthetotalforcesandmomentsblock,FandM,aretheaircraftstatefromEoMblock,theactuator(elevator,rudder,aileronandthrottle)deflectionandenvironmentandaerodynamicdata.Theoutputscanbeobtainedfromthefollowingexpressions
(7)
whereX,Y,Zrepresent aerodynamic forces in body-axes, andFeis engine thrust. The moments are given byM=FL, whereLis the proper moment-arm.
The avionics commands δcfromtheautopilotaretransformedintotheactuator(elevator,rudder,aileronandthrottle)deflectionδbytheactuatorsmodeledassecondordersystems
(8)
whereζatheactuatordampingratio, ωatheactuatornaturalfrequencyandsatdenotesthesaturationwhichisaddedinserieswiththeactuator.
OncethenonlinearUAVmodelinODEformisavailable,themodelingapproachproposedintheprevioussectioncanthenbeappliedtoobtainanexactnonlinearsymbolicLFTmodel,whichwillbeshowcasedinthenextsection.
3 LFT modeling of the UAV
3.1LongitudinalUAVmodel
Foreaseofdemonstration,onlyalongitudinalmodeloftheNOCUAVinthestabilityaxesisderived.
(9)
Theaerodynamiccoefficientsaredescribedas:
CD=CD0+CDαα+CDδeδe
(10)

3.2ExactnonlinearsymbolicLFT
AnexactnonlinearsymbolicLFToftheUAVisobtainedusingthefirstthreestepsfromsection2.2.Notethatalltheirrationalandtrigonometricalfunctionsshouldbeexpressedbyrationalexpressions.SincethelongitudinalmotionofUAVissomewhatsimple,itismoreconvenienttocombinetheFandMandEoMblockstogetherduringmodelingprocess.
Withrespecttostep1ofthemodelingapproach,itisdirecttowritetheODEsfortheUAVmotion(i.e.affineinthestatesandinputs):
(11)
where ρequalsto0.5Sρa(bǔ)irVforeaseofexpression.Animportantconsiderationinapplyingthemodelingframeworkistocovercomplexfunctionsbysinglesymbolicparameters.Hence, ρ1-ρ4areintroducedtoreplacethetrigonometricalfunctionswhereρ1=sin(α-θ), ρ2=cosα, ρ3=cos(α-θ)andρ4=sinα.Atthisstage,thesymbolicparametersareconsideredtobeindependentalthoughtheymaydependonasubsetofsamesystemvariables.SincewewillemploythestructuredtreedecompositionalgorithmwhichcanonlydealwithpolynomialobjectstoacquireLFTmodel,thereciprocalofairspeedVisconsideredalsoanewparameter.i.e. V-1= ρ5.
Thereduceddimensionsofthevehiclesleadtounconventionalperformance,asaresult,smallUAVflightaerodynamicsislesswellunderstoodthanfullsizeaircraft.Therefore,theerroroftheaerodynamicparametersshouldbetakenintoaccount.HerewechoosetheelevenaerodynamicparametersCD0-Cmδeasuncertainties.Intotal,twentytermsinthesystemaredeclaredassymbolicparametersincludingsystemstatesvaryingwithtime(V, α, θ, q),uncertainties(CD0-Cmδe)andtrigonometricalandirrationalreplacements(ρ1-ρ5).Remaindertermsareknownconstantsbecausetheyareinvariantwithrespecttotime.Withoutanylackofgenerality,thefourstatesareusedasoutputsofsystem.Inthiscase, g1(x)equalstoanidentitymatrixandg2(x)iszero.
Next,thenonlinearsymbolicmatricesinEq.(11)combinedwithg1(x)andg2(x)aretransformedintoanonlinearsymbolicLFTwhereallthesymbolicparametersareplacedintheΔ(ρ)matrixbasedonorder-reductionLFTalgorithms.ThetypicalobjectiveistofindaminimalrepresentationduringtheLFTmodelingsothattherepetitionsofthesymbolicparametersinΔ(ρ)areminimum,whichstillremainsanopenproblemdependingondifferentorderreductionmethodologies.Althoughtheproposedapproachisstraightforward,itsapplicationhasonlyrecentlybecomefeasibleduetothesoftwareimplementationofLFToperations.Thestructuredtreedecomposition[9]isusedherefortheLFTmodelingwiththeassistanceofLinearFractionalRepresentation(LFR)toolboxdevelopedatFrenchNationalAeronauticalResearchCenter(OfficeNationald’EtudesetdeRecherchesAérospatiales,ONERA)[5].Thestructuredtreedecompositionisageneralizationoftheideaconsistingoffactorizingsymbolicparameterssothattheyappearastheminimumtimesaspossiblebeforeproceedingtotherealization.
Afterperformingthetransformation,anexactnonlinearsymbolicLFToforder21with17symbolicparameters(CD0-Cmδe, V, ρ1-ρ5)isobtained.AttheexactLFTmodelingstage, αandθbothappearonlyinthetrigonometricalfunctionswhichhavealreadybeenreplacedbyρ1-ρ4,sotheyarenotincludedinthe17symbolicparameters. qdoesn’tshowupbecauseitsappearanceisoneandhasbeenputinthestatevector.
Theactuatorblockismodeledinthesamewayasabove.Thesaturationisconsideredasnonlinearityandalsoreplacedbyasymbolicparameterρ6.
3.3ApproximationsoftheexactLFTmodel
ItisobviousthatinΔ(ρ)oftheexactLFTmodel, ρ1-ρ4areartificialvariablesrepresentingcomplexfunctionsandhavenoexplicitphysicalmeaning.Actually,theyaredependentoneachotherbecauseeachofthemisafunctionofαandθ.Similarly, ρ5arereciprocalwithVandshouldbecovertbacktoV-1afterthestructuredtreedecomposition.Therefore,afurthermanipulationisdemandedtoreducethetotalnumberofindependentparametersinordertoreducetheconservativeness,whichmeanstheartificialparametersintheΔ(ρ)needtobereplacedbytheirexactexpressions(althoughitwouldtypicallyleadtoalargedimensionofthenewΔ(ρ)).TheresultingLFTmodelshouldonlycontainthenaturalsymbolicparametersofthesystem.ThisframeworkcouldbedoneeasilybytakingadvantageofthediagonalstructureofΔ(ρ).OnceaparameterinΔ(ρ)isapproximatedbyanewsymbolicexpression,thisnewexpressioncanbedirectlysubstitutedintothenonlinearsymbolicLFT.Moreover,theexpressioncanalsobeaLFT.Theideaisbasedonthefollowinglemma[6].
Lemma 1 Consider a lower LFT,y=Fl(M, Δ(ρ))uasshowninFig.3a.
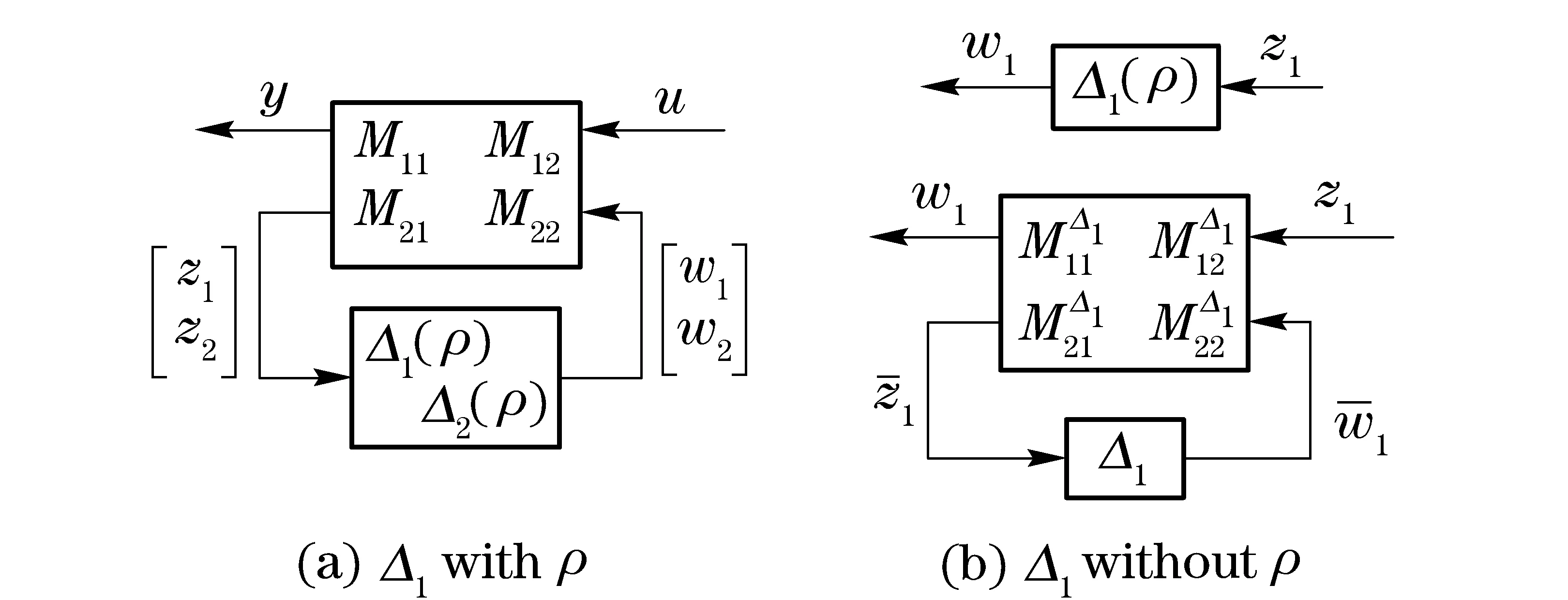
Fig.3 Nested LFT

(12)

Byusingthislemma,theexactexpressionsofρ1-ρ5canbesubstitutedintothenonlinearsymbolicLFT.Asmentionedbefore,alltheirrationalandtrigonometricalfunctionsshouldbeexpressedbyrationalexpressions.Concerningthetrigonometricalfunctions,thefollowingTaylorseriescanbeapplied:
(13)
Thismeansthatαwillappear9timesforasinetermand12timesforacosineterm.
Aftertheapproximationandsubstitution,anonlinearsymbolicLFTwithorder48isobtainedfinally.ItisnotedthattheseapproximationtechniqueswillstillmaintainthenonlinearnatureandprecisionoftheLFTmodeliftheorderofTaylorseriesishighenough.
3.4Validationwithoriginalnonlinearmodel
Whencompletingtheentiremodelingframework,avalidationisrequiredontheresultingnonlinearsymbolicLFTmodelingwiththeoriginalnonlinearmodel.Here,anoceanographicobservationUAVisconsideredasexample.DuetothespecialstructureofthesymbolicLFT,aSimulinkbasedToolbox[10]developedbyONERAisutilizedforthehandlingofLFT.ThistoolboxprovidesaninterfacebetweentheLFRtoolboxandSimulinktofacilitatecomputingtheinterconnectionofdifferentLFTsfromLFRtoolboxandsimulatingtheLFTinSimulinkenvironment.Specialblockssuchasactuatorsaturationshavealsobeenaddedinthetoolbox.TheinterconnectionstructureoftheprobleminthispaperisshowninFig.4.
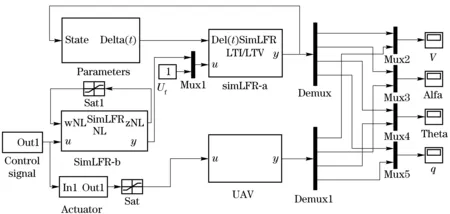
Fig.4 Simulink block for the symbolic LFT
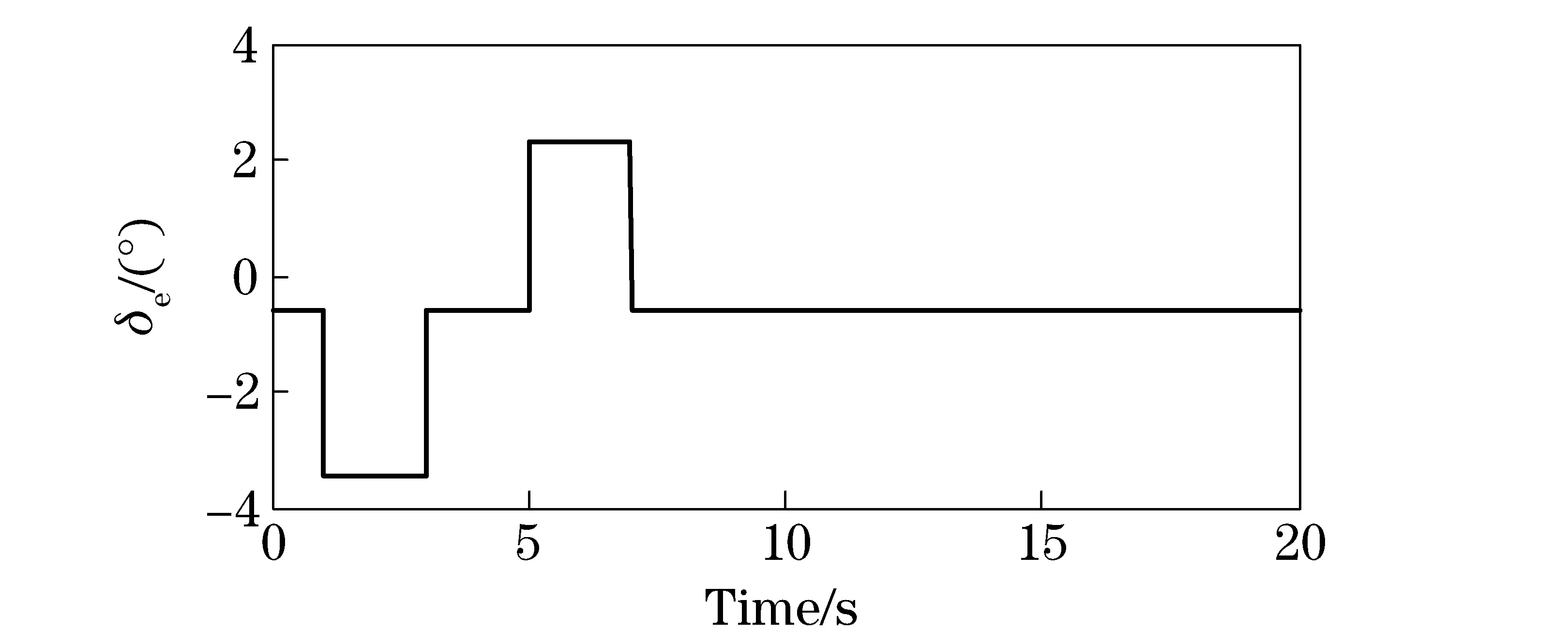
Fig.5 Maneuver input
ThesimLFR-ablockcombinedwith“parameters”blockisusedtosimulatetheUAVLFTmodel,theformerrepresentsMtermwhilethelattercoversΔmatrixintheLFT.SimilarlysimLFR-bblockisused,whichallowssaturationsincludedintheΔtosimulatetheactuatormodel.BeawarethatsimLFR-aandsimLFR-bblockscanalsobelumpedtogethertogenerateonenewLFTautomaticallybythistoolbox[11].ThesimulationofthenonlinearsymbolicLFTiscomparedtothatoftheoriginalnonlinearmodel(UAVand“actuator”blockinthefigure).Themaneuverisa±2.865°doubletelevatordeflectionasshowninFig.5.ThetimeresponsesaregiveninFig.6.
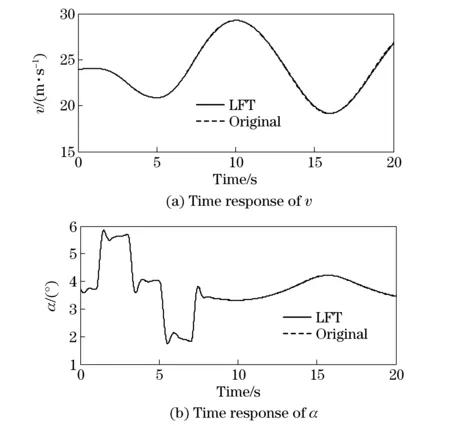
FromFig.6itcanobservedthatthetworesponsesarenearlyidentical,whichimpliesthesymbolicLFTframeworkisadequatetosimulateoranalyzeanonlinearsystem.

Fig.6 Time response of original and nonlinear LFT model
4 Linearized UAV model
Inordertouseasophisticatedlinearrobustcontrolstrategysuchasμ synthesis/analysis, a linear time invariant (LTI) LFT model of the system has to be obtained. The general approach is to symbolically linearize the original nonlinear system.
Write nonlinear model of the UAV as the following general form

y=g(x,u,p)
(14)
wherex,u,yare respectively the state, input and output vectors, andpis vector of varying parameters. These equations can be entered as symbolic objects in MATLAB using Symbolic Math Toolbox. Symbolic linearization is then performed at a given point of the equilibrium surface. We have
y=Cx0,u0,px+Dx0,u0,pu
(15)
wherex,y,udenote the variations with respect to the equilibrium values (x0,y0,u0). We have
(16)
ThentheLFTisperformedtoobtainthelinearLFTmodel[12-13].
AnalternativewaytoderivethelinearmodelwhichcombinesthelinearizationstepandtheLFTstepisusedherewiththeaidofLFRtoolbox.Inthisway,thenonlinearfunctionsinEq.(14)aredefinedasLFR-objectsoriginallyandthen,weexecutetheLFTdifferentiationtogetthefinallinearLFTmodel.Thefollowinglemmaisthebasictheoryofthisapproach[5].
Lemma 2 Let us consider a LFR-objectf
f=M21Δ(I-M11Δ)-1M12+M22
(17)
for some matrices (M11,M12,M21,M22). The matrix Δandthedifferentiationareasfollows
Δ=diag{δ1In1,δ2In2,…}
Hi=diag{0n1×n1,…,0(n1-1)×(n1-1),Ini,
0(n1+1)×(n1+1),…,}
(18)
After the LFT linearization, a linear LFT model is obtained. For the problem in this paper, only the aerodynamic parameters are considered as uncertainties in the linear model. Therefore, all other parameters including the states and inputs of the system are set to the trim value when finishing the LFT linearization. In order to apply μ synthesis/analysis, the uncertainties in Δmatrixshouldbenormalizedwithin[-1, 1].Finally,theresultinglinearLFTmodelisvalidatedwiththeoriginalnonlinearmodelintimedomain.Weusethenominalvalueoftheuncertaintiesinthesimulationtohaveafarecomparison.
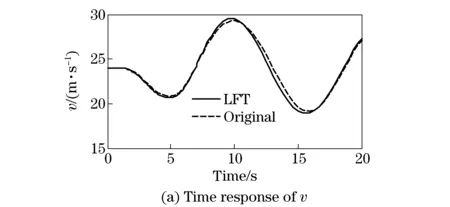
Fig.7illustratesthatthelinearLFTmodelcanalmostcapturethecharacteristicsoftheoriginalnonlinearmodel,whichmeanstheproposedlinearizationmethodologyisfeasibleandtheresultinglinearmodelisreadyforthelinearrobustcontrol/analysis.
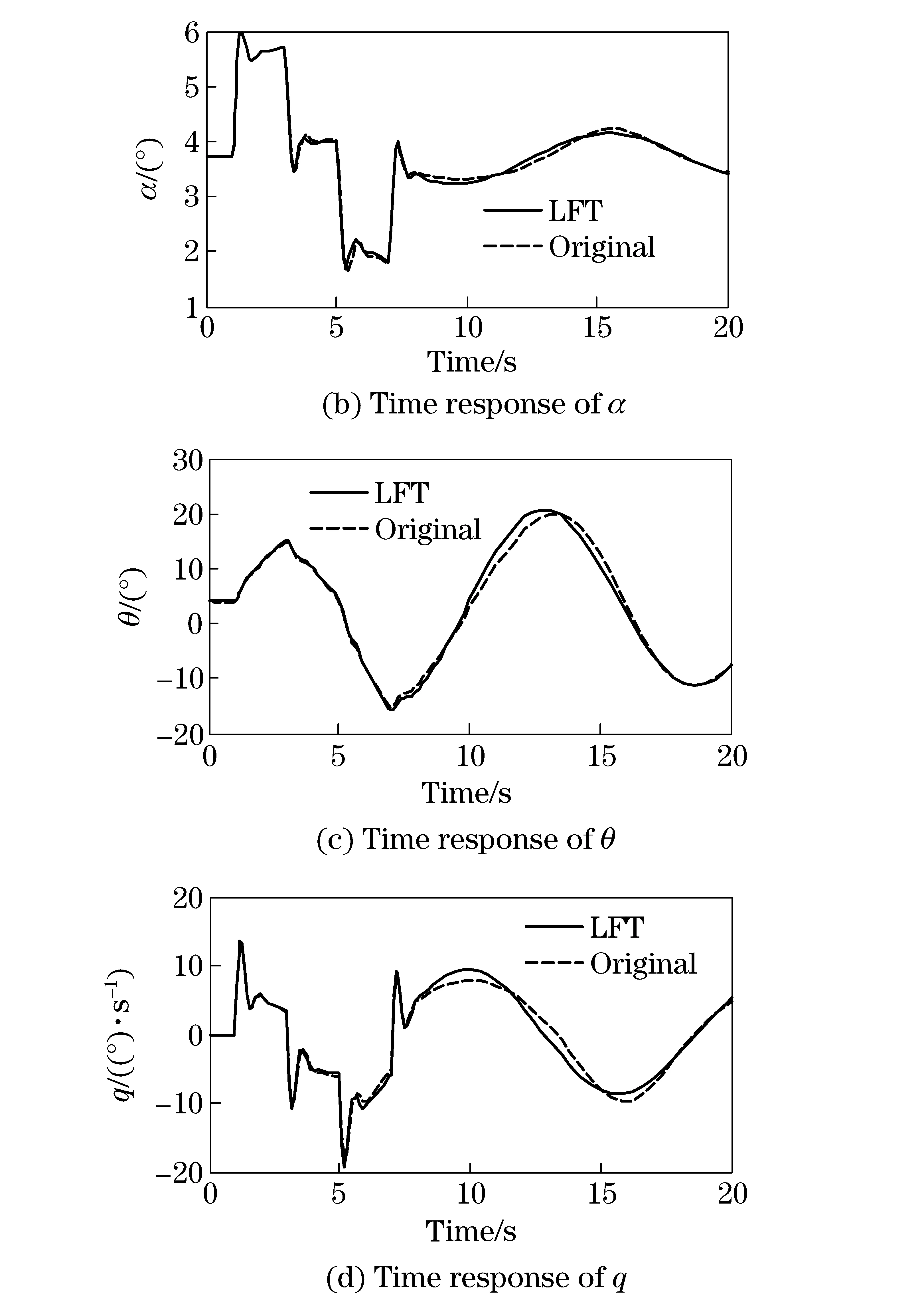
Fig.7 Time response of original and linear LFT model
5 Conclusion
InthispaperanonlinearmodelingframeworkispresentedforanoceanographicUAVbyusingsymbolicmodelingandLFTtechniques.Thismodelingapproachimprovesconsistency,continuityandconnectednessbetweenvariousmodelswhichstemfromthesamenonlinearsystem.Withahighlystructuredrepresentationofthesystem,theresultingnonlinearLFTmodelfacilitatesfurthermanipulationssuchasnestedsubstitutionandLFTdifferentiationinorderforthecontrollerdesignandanalysis.TwoMatlab/SimulinkbasedToolboxsareintroducedtomodelandsimulatethenonlinearsymbolicLFT.Attheendofthispaper,alinearizationmethodologyisstudiedtoobtainthedesign-orientedmodelsuitableforthelinearrobustcontrolstrategy.ThesimulationsofbothnonlinearandlinearLFTmodelintimedomainshowthattheproposedapproachisfeasibleandaccurate.
[1] Matthew Bannett. Development of technologies for low-cost oceanographic unmanned aeronautical vehicles[D]. Southampton: University of Southampton, 2008.
[2] Doyle J C, Packard A, Zhou K. Review on LFTs, LMIs, and μ[C]∥Proceedings of the 30th IEEE Conference, Brighton, 1991: 1227-1232.
[3] Marcos A, Balas G. Development of linear parameter varying models for aircraft[J]. Journal of Guidance Control and Dynamics, 2004, 27(2): 218-228.
[4] Marcos A, Bates D G, Postlethwaite I. Exact nonlinear modeling using symbolic linear fractional transformations[C]∥16th Triennial World Congress of International Federation of Automatic Control, Australia,2005: 190-195.
[5] Magni J F. Linear fractional representation toolbox (version 2.0) for use with Matlab[EB/OL]. [2013-08-20]. http:∥www.cert.fr/dcsd/idco/perso/Magni/.
[6] Marcos A, Bates D G, Postlethwaite I. Nonlinear symbolic LFT tools for modeling, analysis and design[J]. Lecture Notes in Control and Information Sciences, 2007,365:69-92.
[7] Li Meng. Development of modeling and control technologies for small UAV system[D]. Beijing: Beijing Institute of Technology, 2011. (in Chinese)
[8] Biannic J M, Marcos A, Bates D G, et al. Postlethwaite. Nonlinear LFT modeling for on-ground transport aircraft[J]. Lecture Notes in Control and Information Sciences, 2007,365:93-115.
[9] Magni J F. User manual of the linear fractional representation toolbox[R]. France: System Control and Flight Dynamics Department, 2006.
[10] Biannic J M, Doll C. Simulink handing of LFR object[EB/OL]. [2013-09-15]. http:∥www.cert.fr/dcsd/idco/ perso/Biannic/.
[11] Biannic J M, Doll C. Simulink-based tools for creating and simulating interconnected LFR objects[C]∥ IEEE Symposium on Computer-Aided Control System Design, Germany, 2006:1922-1927.
[12] Li Meng, Liu Li, Veres S M. Robustness assessment for flight control system of an oceanographic unmanned aerial vehicle[J]. Journal of Beijing Institute of Technology, 2011, 20(2): 158-167.
[13] Doll C, Berard C, Knauf A, et al. LFT modeling of the 2-DOF longitudinal nonlinear aircraft behavior[C]∥IEEE Int Symposium on Computer-Aided Control System Design, San Antonio, 2008: 864-869.
(Edited by Wang Yuxia)
10.15918/j.jbit1004- 0579.201524.0201
TP 273 Document code: A Article ID: 1004- 0579(2015)02- 0143- 08
Received 2013- 11- 27
E-mail: tuhaifeng86@126.com
猜你喜歡
科教新報(bào)(2024年51期)2024-12-11 00:00:00
知音(月末版)(2023年4期)2023-07-05 02:27:20
Chinese Physics B(2022年8期)2022-08-31 09:59:18
湖北教育·綜合資訊(2022年4期)2022-05-06 22:54:06
歌海(2022年1期)2022-03-29 21:39:55
大眾文藝(2021年13期)2021-07-31 11:04:34
兒童大世界(2019年3期)2019-04-11 03:33:38
女子世界(2017年8期)2017-08-07 23:45:39
商周刊(2017年25期)2017-04-25 08:12:21
閱讀(中年級(jí))(2016年5期)2016-05-14 05:04:44
 Journal of Beijing Institute of Technology2015年2期
Journal of Beijing Institute of Technology2015年2期
- Journal of Beijing Institute of Technology的其它文章
- Numerical simulation of effects of operating conditions on the molecular weight of polypropylene using a response surface method
- Efficient and fair resource allocation in downlink OFDMA systems
- Effect of cutting speed on residual stress of special coating during remanufacturing
- Un-powered gliding aircraft’s ballistic missile optimal design
- Quantification of CP4-EPSPS in genetically modifiedNicotianatabacum leaves by LC-MS/MS with 18O-labeling
- Investigation on experimental method of low-impedance materials using modified Hopkinson pressure bar