
Biased retro-proportional navigation law for interception of high-speed targets with angular constraint
2014-03-09 11:57:04LiangYANJiguangZHAOHuairongSHENYuanLI
Defence Technology 2014年1期
Liang YAN*,Ji-guang ZHAO,Huai-rong SHEN,Yuan LI
Academy of Equipment,Beijing 101416,China
1.Introduction
Interception of high-speed exo-atmospheric targets with angular constraint is a challenging task since the speed of target is higher than that of interceptor in the exo-atmosphere.Recently,several guidance laws using proportional navigation(PN)-based methods have been proposed,which are used to intercept the targets with angular constraint.However,most of the guidance laws are only for intercepting low-speed targets(Ref.[1]and[2])or stationary targets(Ref.[3]and[4]).A biased PN(BPN)guidance law which can be used forintercepting low-speed targets with angular constraint was proposed in Ref.[1].The BPN[5]is one such scheme,in which a fi xed angular rate is superimposed on the measured LOS rate before computing the commanded projectile turn rate (orlateralacceleration).Because of the introduction of an extra parameter(i.e.,rate bias),BPN can achieve an interception with a desired impact angle.This is an important advantage for enhancing warhead effectiveness.
When the guidance laws are used to intercept the highspeed targets without angular constraint,they can be classifi ed as two cases:head-on and tail-chase engagements.In the case of head-on engagement,three-dimensional pure PN(PPN)guidance law[6]is used for engaging the high-speed targets,and a capture+region is obtained.In the case of tail-chase engagement,the retro-PN(RPN)guidance law[7]forinterception ofhigh-speed targetswithoutangular constraint uses a negative navigation ratio.Prasanna et al.demonstrated that the capture region of RPN is larger than that of PN for intercepting high speed target,and reported that it is valuable to incorporate the useful features of both the PN and RPN guidance laws in the future work[7].In this paper,a guidance law,called biased retro-proportional navigation(BRPN),is proposed.BRPN has a very larger capture region compared to BPN.
2.De finition of BRPN guidance law
In this work,the planar motions of interceptor and target are considered.In order to facilitate the whole analysis,some general assumptions are introduced as follows.
1)An interceptor and a target are considered as geometric points moving in a plane.
2)The target is assumed to be non-maneuvering,which is
usually used to express the ballistic targets.3)Gravitational effects are neglected.
Under the above assumptions,a planar engagement geometry,as shown in Fig.1,can be described by the following nonlinear differential equations.The rotation rate of the line of sight(LOS)at any time is given by the following equation

The velocity component along LOF is given by the following equation

where R is the range between interceptor and target,Vmis the interceptor missile velocity,Vtis the horizontal velocity of target,λ is the LOS angle,and γ is the fl ight path(or heading)angle of missile.
Note that,in order to show the impact angle clearly,here the final path angle γfis de fined to be the impact angle.
The rate of change of the interceptor heading is de fined as

where N is the navigation ratio,λ˙ is the LOS rate,andλ˙Bis a rate bias at LOS turn rate.Differentiating Eq.(1),we have

substituting Eqs.(2)and(3)into Eq.(4),we have

Note that


Fig.1.Planar engagement geometry.
where tfis the total intercept time.De finingR˙?-Vc,Vc>0(Vcis the approaching velocity of interceptor[8]).Eq.(7)can be derived from Eqs.(6)and(5),yielding

using Eq.(8)proposed in Ref.[8]

substituting Eq.(8)into Eq.(7),we have

where N′is commonly called the effective navigation ratio[8]and is a constant in this paper.˙

note that,from Eq.(10)that,in order forλ˙ to be convergent,N′should be greater than 2.
Integrating Eq.(10)at the interval from t0to t,

when t=tf,λfis the final LOS angle

Thus,the rate biasλ˙Bis obtained from Eq.(12),

in Eq.(13),the rate of offset angle is a constant.In order that a more accurate rate of offset angle is achieved by using BRPN guidance law,Eq.(13)can be rewritten as

where tgo˙is time-to-go.And time-to-go is de fined as tgo?-R/R.λfcan be obtained from Ref.[9]as

Table 1 Scenario parameters.

Thus,the final path angle γfis the impact angle as mentioned above.Therefore,we can determine the impact angle to identify the value of λfby Eq.(15).
The BPN lateral commanded acceleration is de fined as[9]


Fig.2.Simulation results for BRPN,PN and RPN.
In the above derivation,Eqs.(14)and(16)are used for TV-BPN guidance.
Note that,in the classical BPN guidance law,the navigation ratio N is larger than 0.The interception path is shown in Fig.1(path DC).On the other hand,the BRPN guidance law is to compute the interceptor lateral acceleration using Eq.(16)but use a negative value for navigation ratio N;that is N<0.The interception path is shown in Fig.1(path DA).In BRPNguidance,thecurrenttimecanbeconsideredastheinitial time to get better accuracy.And time-to-go is de fined as tgo?-R/˙R.

Fig.3.Capture regions for BRPN,BPN,PN and RPN.
3.Simulation results
Simulations were run in a MATLAB environment where they were terminated when Vc<0.The range value Rfat this final instant happens to be the miss distance.The target speed Vtis 1500 m/s with(Xt,Yt)=(10,000 m,10,000 m).The interceptor speed Vmis 600 m/s;and the initial range Riis 10,000 m.The initial position of interceptor can be calculated by using Riand initial LOS angle λi.The seeker model is of a perfect seeker(without noise)with a suf ficient large field of view,but it is assumed to be unable to track the target when the range is shorter than 30 m[1],after which the guidance command maintains its last value.The simulations are carried out in a planar engagement scenario.
3.1.Simulation with varied impact angles
Because BRPN and BPN are similar to RPN and PN for intercepting high speed target except the impact angular constraint,RPN and PN proposed in Ref.[7]are used to demonstrate the basic properties of the proposed guidance law.PN and RPN are simulated with a fi xed initial fl ight path angle,and then an impact angle is obtained as the desired impact angle of BRPN.The initial LOS angle λiis 10°.
The first two columns of Table 1 indicate scenario numbers and the guidance scheme used,respectively,the next four columns present the performance variables which are desired impact angle,impact angle,miss distance,and total control effort.Fig.2 shows the simulation results,where scenario numbers of PN and RPN are indicated in the legend and others are indicated on each curve.
The following results can be obtained from Table 1 and Fig.2
1)From the fourth and fi fth columns of Table 1,it can be observed that the impact angle error is less than 2°.From the sixth column of Table 1,it can be noted that the miss distance is less than 0.5 m.
2)Scenarios 2 and 5 are included for comparison.Scenario 2 is presented for comparison with Scenario 3,and Scenario 5 is presented for comparison with Scenario 6.Table 1 and Fig.2 indicate that Scenarios 2,3 and 5,6 are similar in performance.Miss distances of BPN and BRPN are similar to that of PN or RPN,but their control efforts are greater than that of PN or RPN.Interception times of Scenarios 3(BPN)and 6(BRPN)are equal to those of Scenarios 2(PN)and 5(RPN),respectively.
3)From Fig.2(b),it is found that BRPN guidance law requires a relative less lateral acceleration,and its lateral acceleration goes to zero at the terminal stage,unlike BPN where the lateral acceleration increases exponentially at the end of engagement.It is because that the LOS rate and rate bias change abruptly,as shown in Fig.2(c)and(f).As shown in Fig.2(a)and(b),the interceptor path of Scenario 4 embodies the guidance features of both PN and RPN.It is because that acceleration of BRPN aBRPNdecreases from 30.6 g to-8.5 g firstly,and then tends to 2 g(including both negative value and positive value),but aPN<0 and aRPN>0.However,the control effort of Scenario 4 is greater than others in the last column of Table 1.
4)It can be seen from Fig.2(e)that the value of effective navigation ratio of BRPN is greater than that of BPN.It is because that the interceptor’s approaching velocity of BRPN is less than that of BPN,which can be seen from Eq.(8).
5)As shown in Fig.2(f),the value of rate bias of BRPN is
close to zero at the terminal stage,which indicates that BRPN costs lesser control effort compared to the classical BPN guidance law with a fi xed offset value(˙λB≠0)[3].Notethat,fromEq.(10),t→tf,˙λ→˙λf(˙λf=N′/(N′-2)˙λB)(˙λB≠0),thus,interception can be achieved with an additional control effort[5].

Fig.4.Miss distances,impact angle errors and capture regions for BRPN and BPN.
3.2.Capture region for BRPN
The capture region,the collection of the initial conditions under which the interceptor impacts the target with a desired attitude angle,can be sketched only by simulation[1].
In Fig.3,BRPN,BPN,PN and RPN guidance laws for varied values of N are compared by determining all those initial interceptor fl ight directions and impact angles for which capture is possible.Thus,BRPN capture region is de fined in the(γd,γi)space for a fi xed value of initial LOS angle.PN and RPN capture regions are de fined as all those initial interceptor fl ight directions for which capture is possible.For comparison,BPN,PN and RPN capture regions are also shown in Fig.3.PN and RPN capture regions are represented by two straight lines(△).
Four cases,i.e.different initial positions of interceptor de fined by initial LOS angles λiof 5°,10°,14°,and 18°,are shown in Fig.3.The simulations are performed for 36 varied desired impact angles from 0°to 180°and for 36 different initial path angles from 0°to 180°.For BRPN and BPN,|N|=12 and 15(“+”represents N=15, “o”represents N=12 in Fig.3),for PN and RPN,|N|=12.The miss distance Rfis less than 0.5 m,and the error of impact angle|EA|is less than 2°.The acceleration saturation asis 30.61 g.
It can be seen from Fig.3 that the following observations can be obtained
1)Capture region of BRPN is larger than that of BPN for the same absolute value of navigation ratio.However,the capture regions of BRPN and BPN are smaller than those of RPN and PN,respectively.It is because that,for impact angle γd∈(70°,140°),the value of curvature of trajectory is larger,which results in a greater error of time-to-go estimation and the miss distance(Fig.4).Note that,time-togo approximates to-R/˙R,which is based on the assumption of that the trajectory approximates to straight line.
2)The capture region shrinks as the value of N decreases.However,the minimum of|N|should guarantee N′≥ 2.
3)The capture region shrinks as the value of λiincreases from 5°to 18°,and when λiexceeds a particular value,there is no capture region for BRPN law.
Fig.4 shows the miss distance and impact angle error varying with impact angle and initial path angle,with saturated accelerations of 20.41 g and 10.20 g.The absolute value of N is 15 again for BRPN and BPN,the initial LOS angle λiis 10°,the miss distance Rfis less than 0.5 m,and the error of impact angle|EA|is less than 2.It can be seen from Fig.4 that,for BRPN,the values of|EA|and Rfascend when γdincreases from 140°to 180°.From Figs.3(b),4(b)and(d),we can observe that the capture regions shrink as the value of acceleration saturation limit decreases.
Finally,when the BRPN guidance law is implemented in a practical system,FOVof seeker should be about 50°.And the seeker axis can be directed along the relative LOS with respect to the missile body axis[7].If the interceptor is used in a command guidance mode,then this requirement may be avoided.
4.Conclusions
In this paper,a new guidance law,called BRPN,is developed for interception of high-speed targets with angular constraint.The guidance law provides valuable features.First,BRPN can be used to intercept a high-speed target with a desired impact angle.It is an important advantage for enhanced warhead effectiveness.Second,BRPN not only considers the compact angular constraints,but its trajectory can incorporate the useful features of both PN and RPN.Simulation results support the requirements mentioned above.Finally,a slightly bigger error of the desired impact angle is due to simple calculation method of time-to-go estimation.Future work on the BRPN guidance law is to develop a new calculation method of time-to-go estimation,which can reduce the error of the desired impact angle in order to enlarge the capture region.
We offer our heartfelt thanks to professors Ji-guang ZHAO and Huai-rong SHEN for their helpful suggestions in formulating the manuscript.
[1]Kim BS,Lee JG,Han HS.Biased PNG law for impact with angular constraint.IEEE Trans Aero Electron Syst 1998;34(1):277-88.
[2]Ratnoo A,Ghose D.Impact angle constrained guidance against nonstationary nonmaneuvering targets.J Guid Control Dyn 2010;33(1):269-75.
[3]Erer KS,Merttopcuoglu O.Indirect impact-angle-control against stationary targets using biased pure proportional navigation.J Guid Control Dyn 2012;35(2):700-4.
[4]Ratnoo A,Ghose D.Impact angle constrained interception of stationary targets.J Guid Control Dynam 2008;31(6):1816-21.
[5]Murtaugh AS,Criel HE.Fundamentals of proportional navigation.IEEE Spectrum 1966;3(12):75-85.
[6]Tyan F,Jeng FS.Capture region of a three dimensional PPN guidance law against a high speed-nonmaneuvering target.In:Proceedings of the ACC’08.Seattle,WA:IEEE Publ;2008.pp.3488-93.
[7]Prasanna HM,Ghose D.Retro-proportional-navigation:a new guidance law for interception of high speed targets.J Guid Control Dyn 2012;35(2):377-86.
[8]Zarchan P.Tactical and strategic missile guidance.3rd ed.Reston,VA:AIAA;2002.
[9]Siouris GM.Missile guidance and control systems.New York:Springer-Verlag;2004.
- Defence Technology的其它文章
- Estimation of the kinetic parameters for thermal decomposition of HNIW and its adiabatic time-to-explosion by Kooij formula
- Effect of welding processes and consumables on fatigue crack growth behaviour of armour grade quenched and tempered steel joints
- Research on design and firing performance of Si-based detonator
- Analysis of hydrodynamic characteristics of unmanned underwater vehicle moving close to the sea bottom
- Dynamic globularization prediction during cogging process of large size TC11 titanium alloy billet with lamellar structure
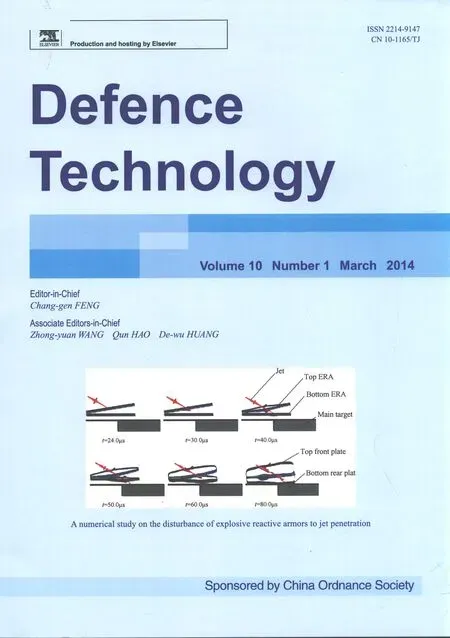
- A numerical study on the disturbance of explosive reactive armors to jet penetration