
Optimal Formation Control for Second-Order Multi-Agent Systems With Obstacle Avoidance
2023-03-09 01:04:50JiaxinZhangWeiLiuandYongmingLi
Jiaxin Zhang,Wei Liu,and Yongming Li,
Dear Editor,
The optimal formation control design problem is studied for a class of second-order multi-agent systems (MASs) with obstacle avoidance.Based on the actor-critic framework,an optimized formation controller is proposed by constructing a novel performance index function.Furthermore,the stability of MAS is proved by constructing the Lyapunov function.The simulation results are provided to depict the effectiveness of the proposed strategies.
The MASs can fully and effectively accomplish some relatively complicated production and living through mutual coordination,and cooperation between multiple agents.Compared with a single agent,multi-agent has many advantages,such as high efficiency,energy saving,high reliability and easy maintenance.Therefore,MASs have attracted much attention,and these research results have been widely used in traffic control,multi-robot cooperative rescue,aerospace,and other fields [1]?[3].A series of issues such as consensus control and formation control have become major research hotspots around MASs [4]?[6].
In [7],the authors investigated time-varying formation problems for general linear MASs with switched directional interaction topologies.The authors in [8] studied distributed time-varying formation control for heterogeneous MASs under the output regulation framework.In addition,[9] analyzed the effect of distance mismatches on the standard gradient-based rigid formation control for MASs.Nevertheless,it must be stressed that the above-mentioned methods on the formation control of MASs did not consider the obstacle avoidance problem.
Designing obstacle avoidance strategies among agents and between agents and environmental obstacles during formation is a prerequisite for safe operation of MASs.In order to solve the above-mentioned deficiencies,many meaningful formation control methods with obstacle avoidance for MASs results have emerged,such as[10]?[12].Hanet al.[10] investigated the formation control problem for MASs with obstacle avoidance under a directed interconnection topology.Subsequently,Ngugenet al.[11] developed an approach to the formation control and obstacle avoidance of multiple rectangular agents with limited communication ranges.Reference [12] presented trajectory control for spacecraft formation flying with obstacle avoidance.Unfortunately,the above results only considered the obstacle avoidance between formation objects and did not consider optimal control requirements.
In recent years,the research on the optimal control problem for MASs have engineering value [13]?[15].For this problem,the authors in [13] designed formation controllers for multiple unmanned aerial vehicles in an obstacle-laden environment.In [14],addressed optimal formation control problem for general linear first-order MASs with collision avoidance.Even though the authors in [15]investigated the problem of adaptive optimized formation control for a class of second-order MASs,it ignored the need for obstacle avoidance.
To our best know ledge,to date,there is no research on the secondorder MASs adaptive leader-following problem in optimal formation control with obstacle avoidance.Motivated by above analysis,this letter first designs an adaptive optimal formation controller for a class of second-order systems.Besides,the proposed control scheme can also guarantee that all agents are able to achieve obstacle avoidance while in formation control.
The remainder of this letter is organized as follows.Firstly,the basic concept and problem statement are given.Secondly,the optimal formation control design and stability analysis are given.Then,simulations illustrating the effectiveness of the developed control method.Finally,the conclusion is given.
Basic concept:
Lemma 2 [16]: The undirected graphGis connected if and only if its Laplacian matrix is irreducible.
Lemma 3 (Young’s inequality): For any vectorsa,b∈Rn,the following Young’s inequality holds:aT b≤( ηp/p)∥a∥p+(1/qηq)∥b∥qwhere η >0 ,p>1,q>1 and (p?1)(q?1)=1.
Problem statement:The second-order MAS is considered in the following:
wherexiandyirepresent position states and velocity states,respectively.uirepresents the system control input.
The leader’s reference trajectory is defined as follow:
wherex0(t) andy0(t) represent reference trajectories,andz0(t) as smooth vector-valued function.
In this letter,the authors will study the optimal formation control problem for second-order MASs with obstacle avoidance,all followers follow the leader’s reference trajectory to forma formation.At the same time,the control system can achieve obstacle avoidance while completing optimal formation task.
Optimal formation control design and stability analysis:Define a coordinate transformation of the following form:
where ηias a constant matrix.
Then,we can obtain that
whereNirepresents neighbor label set of agents.Next,the derivative of (5) and (6) with respect to time yields
To achieve optimal control,we define the Hamilton-Jacobi-Bellman equation as follow:
Simulation:In this section,the authors will verify the effectiveness for proposed leader-following optimal formation control algorithm through numerical simulations.
The simulation results are displayed in Figs.1 and 2.The reference trajectory and the four agents’ trajectories without obstacle avoidance are plotted in Fig.1.It is obvious that formation control has been realized but this control scheme cannot achieve formation obstacle avoidance.Fig.2 shows the trajectories of reference trajectory and agents with obstacle avoidance.Compared with Fig.1,Fig.2 shows that the control method realizes obstacle avoidance in formation process.Clearly,all tracking errors in the system are bounded and the optimal formation control with obstacle avoidance is achieved.
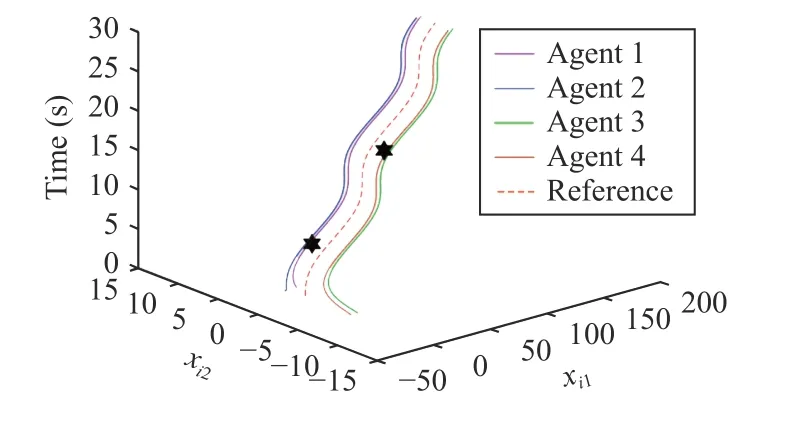
Fig.1.Trajectories of the leader and agents without obstacle avoidance.
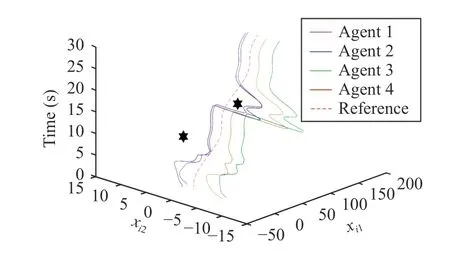
Fig.2.Trajectories of the leader and agents with obstacle avoidance.
From these simulation results,it can be determined that required formation pattern,obstacle avoidance among the followers can be ensured to accomplish desired control objectives.
Conclusion:This letter has explored the adaptive optimal formation control design problem for a class of second-order MASs with obstacle avoidance.By using the Lyapunov function,it has been proved that the control systems are stable.The simulation results have been given to illustrate the effectiveness of the proposed control methods.In the future,we will study the connectivity maintenance problem under the premise of obstacle avoidance.
Acknowledgments:This work was supported by the National Natural Science Foundation of China (61822307).
 IEEE/CAA Journal of Automatica Sinica2023年2期
IEEE/CAA Journal of Automatica Sinica2023年2期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- The Distribution of Zeros of Quasi-Polynomials
- Straight-Path Following and Formation Control of USVs Using Distributed Deep Reinforcement Learning and Adaptive Neural Network
- Prescribed-Time Stabilization of Singularly Perturbed Systems
- Visual Feedback Disturbance Rejection Control for an Amphibious Bionic Stingray Under Actuator Saturation
- Dynamic Target Enclosing Control Scheme for Multi-Agent Systems via a Signed Graph-Based Approach
- CoRE: Constrained Robustness Evaluation of Machine Learning-Based Stability Assessment for Power Systems