
多圓碟形水下滑翔機(jī)的雙層協(xié)調(diào)三維路徑規(guī)劃
2022-03-31 01:14:34王浩亮盧麗宇李文華王安青
控制理論與應(yīng)用 2022年11期
王浩亮,盧麗宇,王 丹,李文華,劉 陸,王安青
(1.大連海事大學(xué)輪機(jī)工程學(xué)院,遼寧大連 116026;2.大連海事大學(xué)船舶電氣工程學(xué)院,遼寧大連 116026)
1 引言
近年來(lái)水下滑翔機(jī)(autonomous underwater glider,AUG)被廣泛應(yīng)用于一些特定的水下作業(yè)任務(wù),如海洋監(jiān)測(cè)、海底搜索以及海底地形探測(cè)等[1].在海流和礙航物影響下,為了使AUG能在復(fù)雜海洋環(huán)境中安全到達(dá)預(yù)定海域,適合的路徑規(guī)劃算法是非常必要的.因此,作為運(yùn)動(dòng)控制的上層算法[2-4],路徑規(guī)劃一直是AUG研究領(lǐng)域的熱點(diǎn)問(wèn)題.
在單水下航行器路徑規(guī)劃方面,文獻(xiàn)[5]以能量消耗為優(yōu)化目標(biāo),采用遺傳算法實(shí)現(xiàn)了水下航行器的路徑規(guī)劃.文獻(xiàn)[6]采用兩步鏈?zhǔn)剿惴ㄑ芯苛嘶谀芎淖顑?yōu)的AUG路徑規(guī)劃問(wèn)題.文獻(xiàn)[7]采用改進(jìn)的粒子群優(yōu)化算法,實(shí)現(xiàn)了以能量消耗為優(yōu)化目標(biāo)的圓碟形AUG路徑規(guī)劃.文獻(xiàn)[8-9]分別采用A*算法和自主啟發(fā)式神經(jīng)網(wǎng)絡(luò)算法對(duì)水下航行器路徑規(guī)劃中的避障問(wèn)題進(jìn)行了研究.文獻(xiàn)[10]提出一種基于區(qū)間優(yōu)化的最優(yōu)時(shí)間路徑規(guī)劃算法,增強(qiáng)了路徑規(guī)劃器的魯棒性并解決了生成路徑不可行問(wèn)題.文獻(xiàn)[11]提出一種以期望時(shí)間為優(yōu)化指標(biāo)的概率多目標(biāo)搜索算法,可顯著縮短路徑規(guī)劃時(shí)目標(biāo)搜索的期望時(shí)間.文獻(xiàn)[12]采用基于異步多線(xiàn)程近端優(yōu)化策略的路徑規(guī)劃方法,研究了海流影響下的路徑規(guī)劃問(wèn)題.文獻(xiàn)[13]采用基于仿生神經(jīng)網(wǎng)絡(luò)的最優(yōu)路徑規(guī)劃方法,研究了海流和水下礙航物影響下的最短路徑規(guī)劃.在水下航行器集群路徑規(guī)劃方面,文獻(xiàn)[14-15]分別采用改進(jìn)波前算法和動(dòng)態(tài)規(guī)劃算法研究了基于時(shí)間最優(yōu)的集群路徑規(guī)劃.文獻(xiàn)[16]采用偏差最小一致性算法實(shí)現(xiàn)了航行終點(diǎn)同時(shí)到達(dá)目標(biāo)下的集群路徑規(guī)劃.文獻(xiàn)[17]采用蟻群優(yōu)化算法和差異進(jìn)化算法,研究了不同目標(biāo)任務(wù)下的最短路徑規(guī)劃.文獻(xiàn)[18]采用改進(jìn)的模塊化A*算法,研究了基于能耗最優(yōu)的集群路徑規(guī)劃.然而,以上集群路徑規(guī)劃方法僅解決了水平面內(nèi)水下航行器的路徑規(guī)劃問(wèn)題.
在分析上述文獻(xiàn)的基礎(chǔ)上,本文采用基于量子行為的自適應(yīng)粒子群優(yōu)化方法(quantum-behaved adaptive particle swarm optimization,QAPSO)和人工勢(shì)場(chǎng)法(artificial potential field,APF)構(gòu)建了雙層協(xié)調(diào)結(jié)構(gòu),用于解決多圓碟形AUG在海流干擾和水下礙航物影響下的三維路徑規(guī)劃問(wèn)題.首先,建立了圓碟形AUG的航行時(shí)間模型,設(shè)計(jì)了三維路徑規(guī)劃的優(yōu)化目標(biāo).然后,構(gòu)建了基于三維離散空間的全局路徑規(guī)劃和基于APF方法的局部路徑規(guī)劃,保證了不同優(yōu)先級(jí)的AUG在無(wú)碰撞情況下安全滑翔.最后,基于雙層協(xié)調(diào)路徑規(guī)劃結(jié)構(gòu),采用QAPSO方法實(shí)現(xiàn)了時(shí)間最優(yōu)目標(biāo)下多圓碟形AUG的三維路徑規(guī)劃.
與現(xiàn)有水下航行器路徑規(guī)劃研究結(jié)果相比,所提三維集群路徑規(guī)劃方法的優(yōu)點(diǎn)如下:相比與文獻(xiàn)[5-13]提出的路徑規(guī)劃僅適用于單水下航行器,本文提出了適用于多AUG的路徑規(guī)劃方法.相比與文獻(xiàn)[14-18]致力于二維水平面的集群路徑規(guī)劃,所提路徑規(guī)劃方法能夠滿(mǎn)足AUG集群開(kāi)展三維海洋觀測(cè)的路徑規(guī)劃需求,且具有避障避碰功能,解決了多AUG之間以及AUG與礙航物之間的碰撞問(wèn)題.相比與經(jīng)典進(jìn)化算法中的遺傳算法(genetic algorithm,GA)[19]和粒子群算法(particle swarm optimization,PSO)[20]容易提前收斂而陷入局部最優(yōu),QAPSO求解能力更強(qiáng),更容易獲得全局最優(yōu)路徑.
2 時(shí)間最優(yōu)下的多AUG路徑規(guī)劃結(jié)構(gòu)
2.1 采用雙層協(xié)調(diào)結(jié)構(gòu)的多AUG路徑規(guī)劃
為研究圓碟形AUG的路徑規(guī)劃,首先需要建立一個(gè)合適的坐標(biāo)系來(lái)描述AUG的位置與運(yùn)動(dòng)狀態(tài).海洋環(huán)境下的慣性坐標(biāo)系{I}如圖1所示.
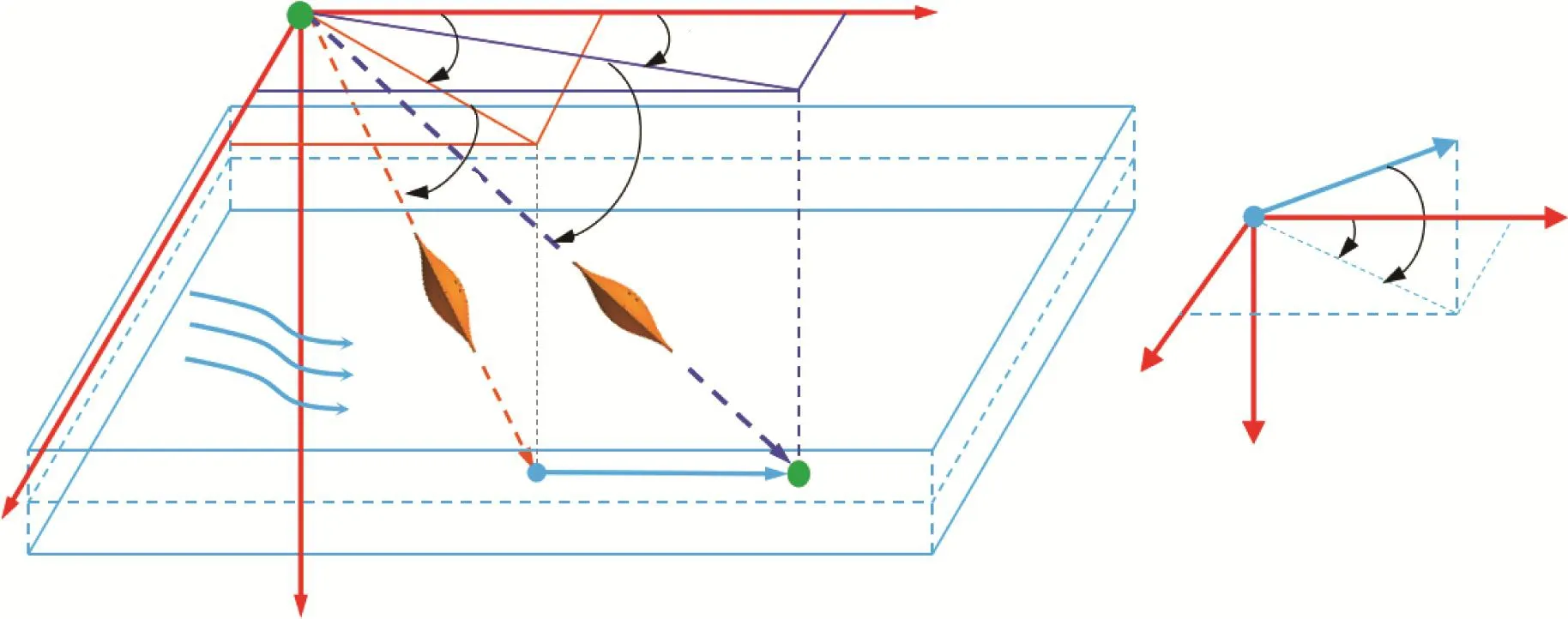
圖1 海洋環(huán)境下的固定坐標(biāo)系Fig.1 Fixed coordinate system in ocean environment
在海洋環(huán)境中可將AUG簡(jiǎn)化為一個(gè)質(zhì)點(diǎn),其中AUG起點(diǎn)為PS=(xS,yS,zS),終點(diǎn)為PD=(xD,yD,zD),當(dāng)前位置為(x,y,z),AUG對(duì)水航速為V,對(duì)地航速為VG,海流速度為Vc,ψ,Ψ和ψc分別為V,VG和Vc在XEOEYE平面的投影與XE軸的夾角,θ,Θ和θc分別為V,VG和Vc與其在XEOEYE平面投影的夾角,由此可得
在目前的多海洋航行器路徑規(guī)劃方法中,采用全局規(guī)劃算法很難應(yīng)對(duì)局部路徑的實(shí)時(shí)協(xié)調(diào),而傾向于局部規(guī)劃的方法又難以形成優(yōu)質(zhì)的全局路徑.針對(duì)這一問(wèn)題,本文提出一種基于全局與局部雙層協(xié)調(diào)的多AUG路徑規(guī)劃結(jié)構(gòu),如圖2所示,全局路徑規(guī)劃層采用QAPSO方法,根據(jù)給定的優(yōu)化目標(biāo)為每個(gè)AUG規(guī)劃出一條滿(mǎn)足操縱性要求的路徑,同時(shí)該路徑避免了與礙航物的碰撞,局部路徑協(xié)調(diào)層根據(jù)多AUG之間的避碰要求,采用APF方法來(lái)解決AUG間的碰撞問(wèn)題.
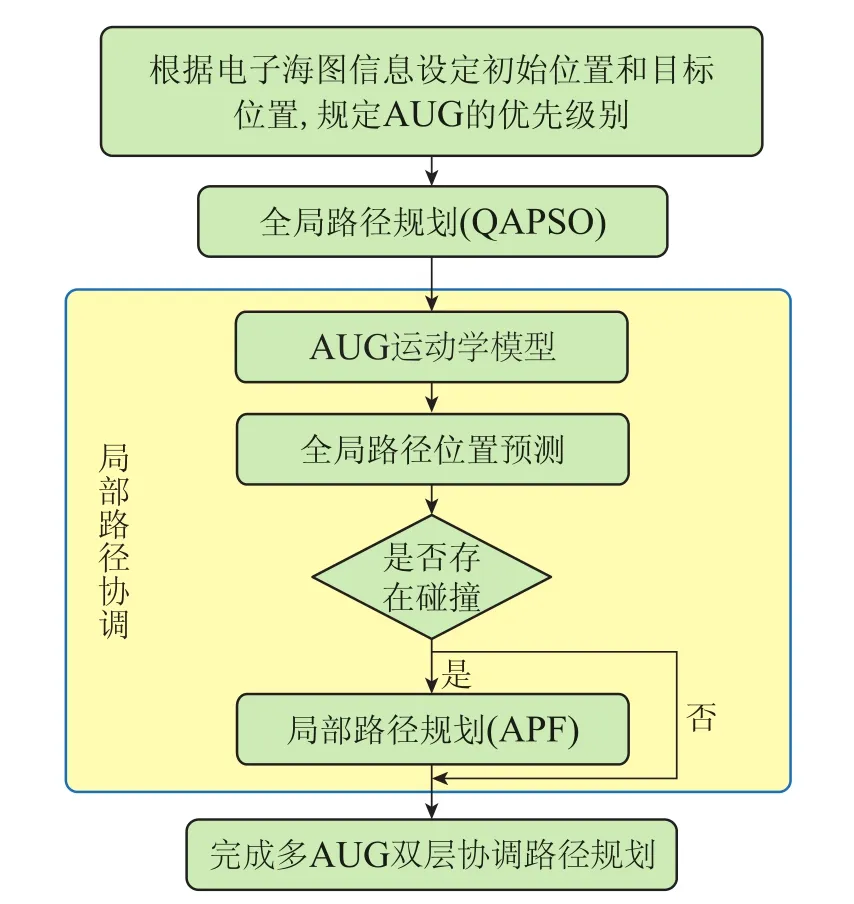
圖2 雙層協(xié)調(diào)多AUG路徑規(guī)劃流程圖Fig.2 Flow diagram of multi-AUG path planning under double-layer coordination
雙層協(xié)調(diào)結(jié)構(gòu)可以被概括為:首先采用QAPSO方法進(jìn)行全局路徑規(guī)劃,然后根據(jù)全局路徑規(guī)劃結(jié)果對(duì)全局路徑組中的各條路徑進(jìn)行預(yù)測(cè),當(dāng)發(fā)現(xiàn)AUG之間存在碰撞趨勢(shì)時(shí),提取碰撞點(diǎn)周?chē)沫h(huán)境信息以及AUG在全局路徑上的運(yùn)動(dòng)信息進(jìn)行局部路徑協(xié)調(diào),從而避免碰撞發(fā)生.
2.2 AUG航行時(shí)間模型
由于AUG的額定航速和海流速度處在同一量級(jí),海流將對(duì)AUG的航行時(shí)間產(chǎn)生較大影響.一般而言,在一定范圍內(nèi)洋流強(qiáng)度在不同深度處相差不大,可視為不同深度具有同一環(huán)流分布,因此本文將三維洋流模型簡(jiǎn)化為若干個(gè)二維洋流模型的分層疊加,采用分層建模的方法構(gòu)建三維海流場(chǎng).為模擬AUG水下航行時(shí)的洋流情況,本文采用若干個(gè)粘性Lamb渦疊加來(lái)建立海洋環(huán)流模型,Lamb渦可表示為
其中:為二維的空間區(qū)域,為渦旋的中心位置,D為渦旋強(qiáng)度,δ為渦旋半徑.
在實(shí)際執(zhí)行海洋任務(wù)時(shí),經(jīng)常需要AUG以最短的航行時(shí)間到達(dá)目標(biāo)點(diǎn),因此需要建立考慮海洋環(huán)境的AUG航行時(shí)間模型.由于路徑上的海流分布不均,因此僅計(jì)算某節(jié)點(diǎn)處的速度或計(jì)算路徑上所有點(diǎn)的速度都是不夠合理的[15],所以本文以海流柵格為單位采用插值法將全局路徑細(xì)化,航行時(shí)間的計(jì)算方法論述如下.
如圖3所示,Vn為AUG在Pn點(diǎn)處的對(duì)水航速且假設(shè)其為一個(gè)恒定值|Vn|=U*,Vcn為Pn點(diǎn)處的海流速度,VGn為AUG在Pn點(diǎn)處指向下一點(diǎn)的對(duì)地速度.顯然,可以通過(guò)調(diào)整AUG的姿態(tài)角改變Vn的方向,并與海流作用Vcn疊加為合成速度VGn,因此,|VGn|的求解可通過(guò)余弦定理求得行,此時(shí)將一個(gè)很小的正數(shù)作為|VGn|的解,以此可得出滑翔在該路徑上所花費(fèi)的時(shí)間接近無(wú)窮大,因此該路徑不是可選的最優(yōu)路徑.對(duì)于出現(xiàn)兩個(gè)正數(shù)解的情況,則選擇較大的一個(gè)作為|VGn|的解,因?yàn)檩^大的速度可獲得較短的航行時(shí)間.同理可得|VGn+1|,將|VGn,n+1|=(|VGn|+|VGn+1|)/2作為航行在路徑Pn Pn+1上的速度,則在此路徑段的航行時(shí)間可表示為
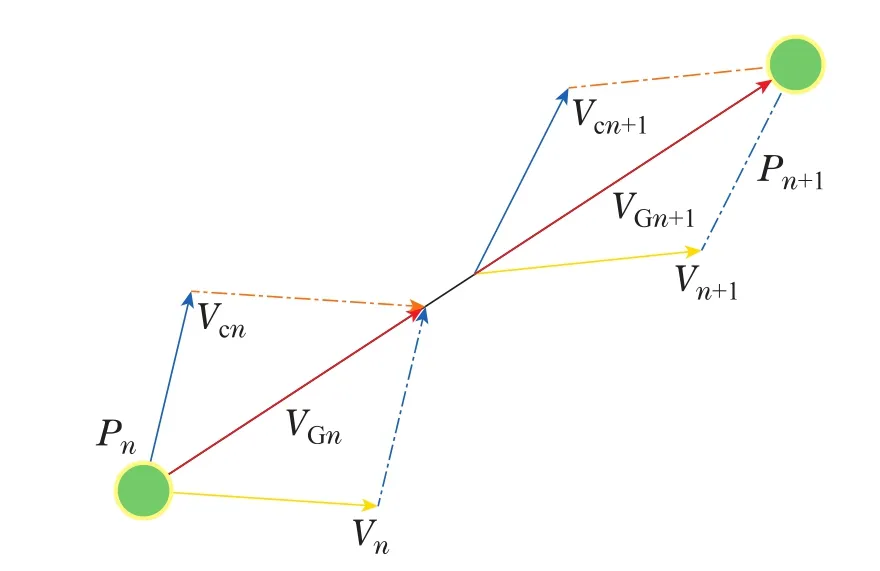
圖3 航行速度示意圖Fig.3 Diagram of sailing speed
其中|Sn,n+1|為路徑點(diǎn)Pn到點(diǎn)Pn+1的水平距離.
綜上所述,AUG整個(gè)航程時(shí)間之和為
其中N為插值后細(xì)化的路徑點(diǎn)總數(shù).
3 雙層協(xié)調(diào)結(jié)構(gòu)下的多AUG路徑規(guī)劃方法
3.1 基于QAPSO的全局路徑規(guī)劃方法
3.1.1 基于三維離散空間的全局路徑規(guī)劃構(gòu)建
傳統(tǒng)基于慣性坐標(biāo)系的柵格法僅能選擇相鄰8個(gè)方向的柵格,限制了路徑選擇的最優(yōu)性[21].本文將水下三維空間離散化,建立基于環(huán)境信息的離散空間模型.將路徑起點(diǎn)和終點(diǎn)的連線(xiàn)作為橫坐標(biāo),通過(guò)變換慣性坐標(biāo)系OE-XEYEZE來(lái)表示離散空間,用于AUG的路徑規(guī)劃.
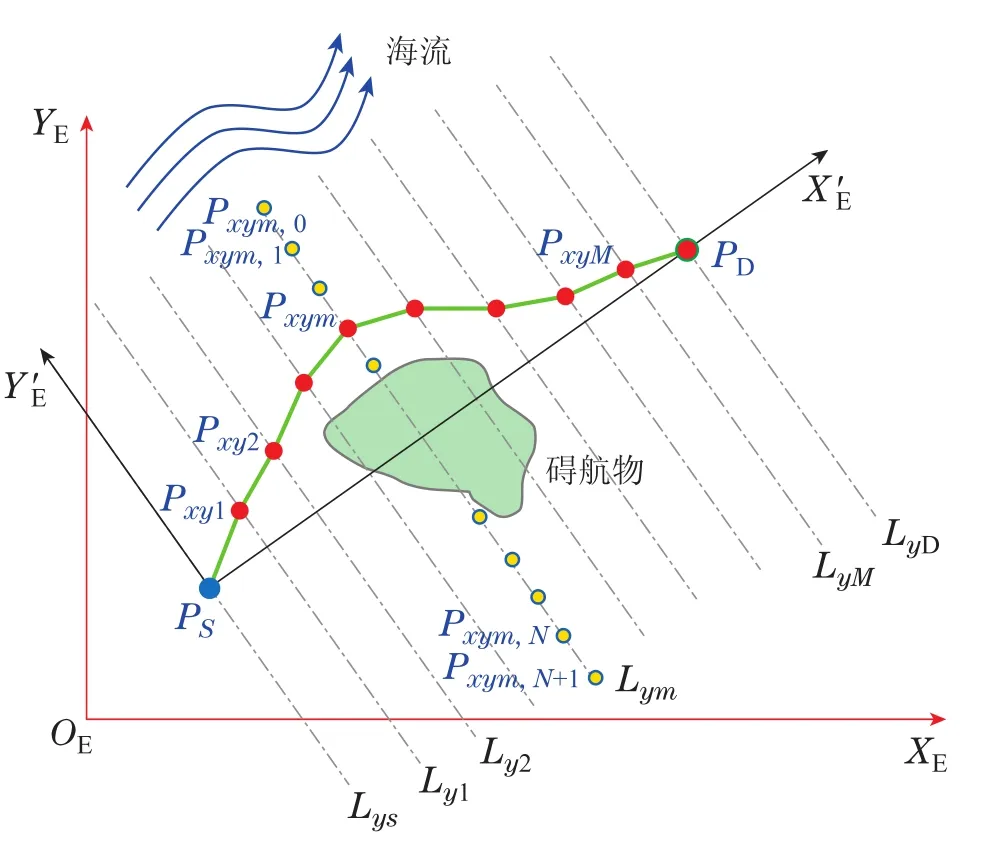
圖4 水平面離散建模示意圖Fig.4 Diagram of horizontal discrete modeling
采用路徑解耦方法規(guī)劃出的水平面最優(yōu)路徑點(diǎn)集合和縱平面最優(yōu)路徑點(diǎn)集合在軸上具有相同的坐標(biāo),因此可以將Pxy和Pxz中的路徑點(diǎn)按照軸上坐標(biāo)一致的原則合成三維最優(yōu)路徑點(diǎn)集合Pxyz={PS,P1,P2,···,PD},由此建立三維離散空間模型,將集合Pxyz中各節(jié)點(diǎn)依次相連形成的路徑即為三維空間的最優(yōu)路徑.
此外,也可以根據(jù)水平面和縱平面離散建模的方法直接生成三維路徑點(diǎn).通常,AUG的典型運(yùn)動(dòng)工況為縱平面內(nèi)的鋸齒形運(yùn)動(dòng),鑒于欠驅(qū)動(dòng)圓碟形AUG的運(yùn)動(dòng)能力受限,其路徑規(guī)劃需要考慮下潛深度H和航跡角Θ.如圖5所示,可將AUG的運(yùn)動(dòng)海域劃分成垂直于軸的M個(gè)平面,該平面由Mx維與Mz維中具有交點(diǎn)的直線(xiàn)兩兩相交組成,記為集合x(chóng)yz={Ly1×Lz1,Ly2×Lz2,···,LyM×LzM}.利用QAPSO方法,以AUG航行時(shí)間最短為優(yōu)化目標(biāo)求取集合x(chóng)yz上的三維路徑點(diǎn)集合Pxyz,由此可獲得時(shí)間最優(yōu)的三維路徑.
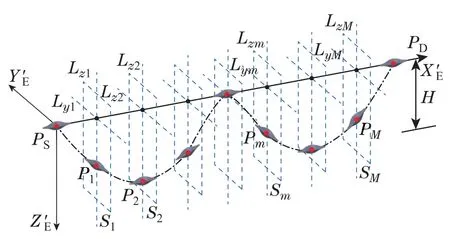
圖5 三維離散建模示意圖Fig.5 Diagram of 3D discrete modeling
上述路徑規(guī)劃方法得到的初始數(shù)據(jù)是一些離散化的路徑點(diǎn),將其直接相連形成的路徑可能無(wú)法滿(mǎn)足欠驅(qū)動(dòng)圓碟形AUG的運(yùn)動(dòng)需求,因此需要對(duì)路徑進(jìn)行光順處理,本文采用Hermite插值法[22],最終得到滿(mǎn)足AUG跟蹤需求的連續(xù)光滑路徑.
3.1.2 QAPSO方法
相比文獻(xiàn)[20]中所提到的粒子群算法(particle swarm optimization,PSO),QAPSO方法去除了粒子速度參數(shù),只保留粒子位置,其粒子位置用概率密度函數(shù)的形式表示,并且引入了自適應(yīng)擴(kuò)張因子的概念,擴(kuò)大了算法的搜索范圍,提高了算法的尋優(yōu)能力.QAPSO方法的基本思想為在M維搜索域中,隨機(jī)初始化一組規(guī)模為N的粒子群,粒子群中各粒子位置用概率密度函數(shù)的形式表示[23],通過(guò)迭代的方法在搜索域中尋找最優(yōu)值.位于第m維的粒子i通過(guò)跟蹤吸引子pim的位置,可以得到粒子i的第m維進(jìn)化方程[24]
其中:為區(qū)間[0,1]上均勻分布的隨機(jī)數(shù),吸引子為粒子i在m維搜索域上的個(gè)體極值.
其中α表示收縮擴(kuò)張因子.α是算法收斂至關(guān)重要的因素,在整個(gè)搜索過(guò)程中起到了權(quán)衡全局搜索和局部搜索的作用.基于粒子個(gè)體適應(yīng)度值評(píng)價(jià)體系建立了自適應(yīng)收縮擴(kuò)張因子,以求最小值為例,收縮擴(kuò)張因子更新公式為
其中XS和XD分別為路徑起始點(diǎn)和目標(biāo)點(diǎn)的坐標(biāo).將該項(xiàng)信息加入,則基于QAPSO方法的粒子進(jìn)化方程為
3.1.3 具有懲罰功能的適應(yīng)度函數(shù)
QAPSO方法中所有粒子都有一個(gè)被目標(biāo)函數(shù)決定的適應(yīng)度值,即適應(yīng)度函數(shù)值[25].本文取航行時(shí)間模型為適應(yīng)度函數(shù).由于某些相鄰路徑點(diǎn)的連線(xiàn)會(huì)與礙航物相交而成為非法路徑,若直接去掉這些路徑,則可能影響算法的迭代,路徑的多樣性也會(huì)隨之減弱,因此構(gòu)造帶有懲罰函數(shù)的適應(yīng)度函數(shù)[26],通過(guò)附加較大的懲罰度,使路徑在優(yōu)化過(guò)程中自動(dòng)淘汰非法路徑.以粒子i在第T次迭代產(chǎn)生的路徑點(diǎn)為例,粒子的適應(yīng)度值為路徑起始點(diǎn)PS至路徑點(diǎn)PD的航行時(shí)間,具有懲罰功能的適應(yīng)度函數(shù)設(shè)置如下:
3.2 基于APF的局部路徑規(guī)劃方法
經(jīng)過(guò)全局路徑規(guī)劃可以獲得每艘AUG從起始點(diǎn)到目標(biāo)點(diǎn)的優(yōu)化路徑,根據(jù)相應(yīng)路徑可以計(jì)算出AUG經(jīng)過(guò)各路徑點(diǎn)的時(shí)刻,并以此來(lái)預(yù)測(cè)出AUG間可能存在碰撞的路徑點(diǎn).
如圖6所示,當(dāng)優(yōu)先級(jí)較低的第i艘AUG出現(xiàn)在黃色警戒區(qū)域SjAUG時(shí),即認(rèn)為碰撞危險(xiǎn)可能發(fā)生.局部調(diào)整的目的是當(dāng)判斷碰撞可能發(fā)生時(shí)采用APF方法進(jìn)行局部路徑協(xié)調(diào),讓優(yōu)先級(jí)低的AUG提前調(diào)整航向來(lái)避讓優(yōu)先級(jí)高的AUG,以此來(lái)防止碰撞的發(fā)生.
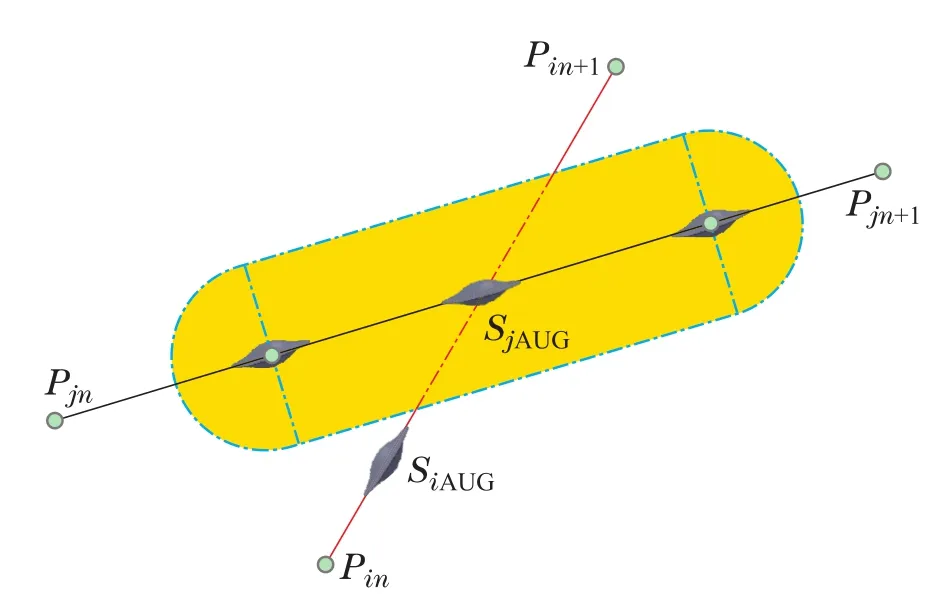
圖6 AUG碰撞風(fēng)險(xiǎn)示意圖Fig.6 Diagram of AUG collision risk
傳統(tǒng)APF方法在礙航物處生成斥力勢(shì)場(chǎng),同時(shí)在目標(biāo)點(diǎn)處生成引力勢(shì)場(chǎng)[27],使航行器在引力和斥力的合力作用下沿?zé)o礙航物的路徑運(yùn)動(dòng),在本文中則具體考慮為來(lái)自期望路徑的引力和其他AUG的斥力.
斥力勢(shì)場(chǎng)可表示為
其中:ri和rj分別表示第i艘AUG和第j艘AUG的位置,ρ(ri,rj)為兩艘AUG之間的相對(duì)距離,ρ0為斥力場(chǎng)的影響范圍,krep為斥力場(chǎng)強(qiáng)度系數(shù),?表示函數(shù)的梯度.引力勢(shì)場(chǎng)可表示為
其中:r0為路徑上參考位置的坐標(biāo),katt為引力場(chǎng)強(qiáng)度系數(shù).
斥力和引力的合力為
通過(guò)斥力與引力的合成力可計(jì)算出下一位置點(diǎn),直到合力將AUG拉回全局路徑.
4 仿真分析
為驗(yàn)證所提基于雙層協(xié)調(diào)結(jié)構(gòu)的多圓碟形AUG三維路徑規(guī)劃方法的有效性,按照AUG的不同作業(yè)情形,分3種典型任務(wù)討論海流和礙航物影響下的路徑規(guī)劃.整個(gè)仿真忽略AUG由于導(dǎo)航定位及路徑跟蹤控制誤差所帶來(lái)的實(shí)際位置偏差,將AUG對(duì)水航速設(shè)置為V=0.25m/s,滑翔角設(shè)置為Θ=35°.QAPSO和APF方法的具體參數(shù)設(shè)置如表1所示.
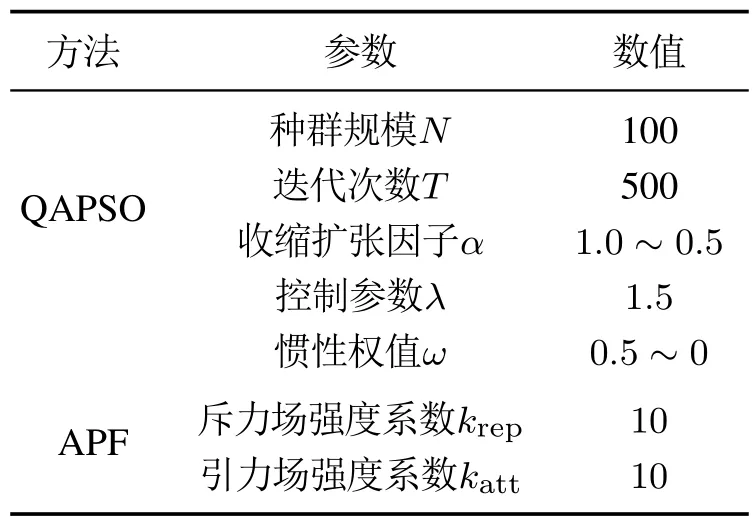
表1 QAPSO和APF方法參數(shù)設(shè)置Table 1 Parameters of QAPSO and APF methods
任務(wù)1:針對(duì)單個(gè)AUG,基于雙層協(xié)調(diào)結(jié)構(gòu),在全局規(guī)劃層采用QAPSO方法,根據(jù)時(shí)間最優(yōu)的原則在航行水深H=80m工況下進(jìn)行路徑規(guī)劃,并與經(jīng)典進(jìn)化算法中的GA[19]和PSO算法[20]進(jìn)行比較,3種路徑規(guī)劃方法的仿真結(jié)果分別如圖7-8和表2所示.
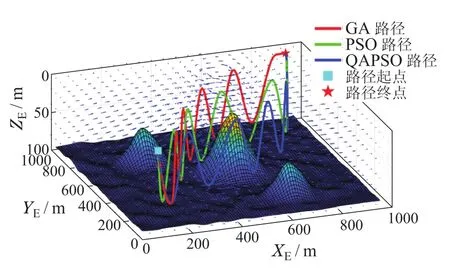
圖7 3種方法的全局路徑規(guī)劃對(duì)比圖Fig.7 Global path planning comparison diagrams of three algorithms
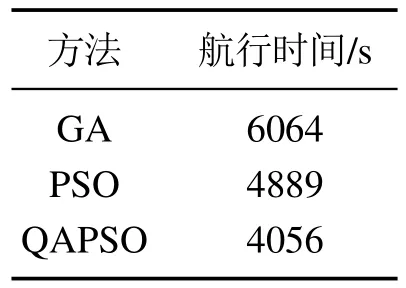
表2 AUG航行時(shí)間Table 2 AUG sailing time
由圖7可知,路徑起點(diǎn)和終點(diǎn)分別為(100,100,0)和(900,900,0).針對(duì)AUG航行時(shí)間的優(yōu)化路徑,GA,PSO和QAPSO三種方法均可實(shí)現(xiàn)求解,路徑全段基本順應(yīng)海流方向,同時(shí)避開(kāi)礙航物并且規(guī)避海流較大的區(qū)域.此外,通過(guò)圖8的迭代曲線(xiàn)可以看出,在海流環(huán)境較復(fù)雜的情況下,GA算法最先陷入局部最優(yōu),隨后PSO方法收斂陷入局部最優(yōu),QAPSO方法因其具備量子性質(zhì)的優(yōu)勢(shì)持續(xù)尋優(yōu),直至找到更優(yōu)的路徑,驗(yàn)證了所提方法的求解能力.
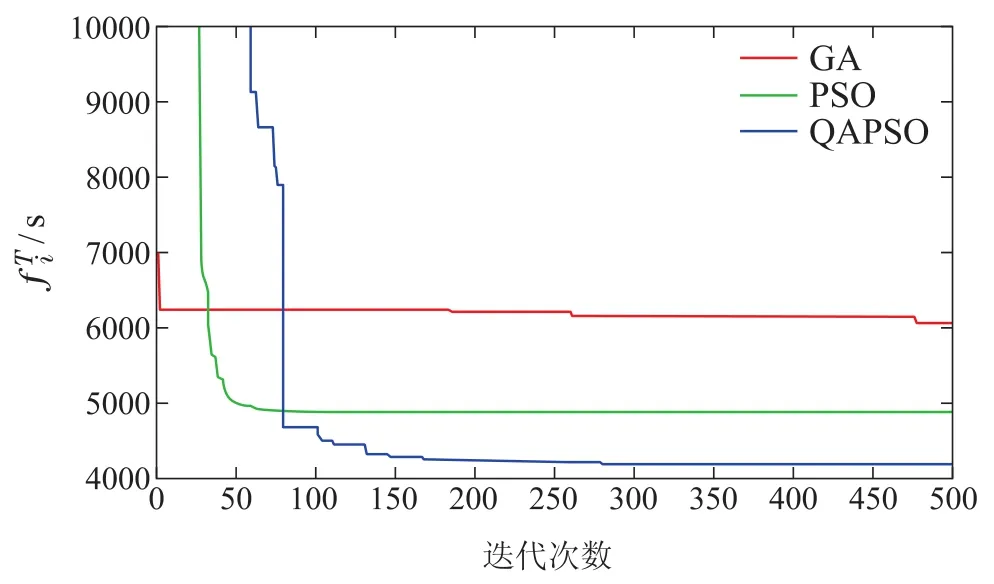
圖8 3種方法的時(shí)間最優(yōu)迭代圖Fig.8 Time-optimal iteration comparison diagrams of three algorithms
根據(jù)不同進(jìn)化算法得到的航行時(shí)間如表2所示.
由表2可知,雖然3種路徑規(guī)劃方法均能規(guī)劃出避開(kāi)礙航物的水下路徑,但QAPSO方法用時(shí)最短,航行時(shí)間分別約為GA和PSO算法的70%和83%.
任務(wù)2:針對(duì)兩艘AUG相遇情形,采用所提路徑規(guī)劃方法進(jìn)行三維上浮路徑規(guī)劃.兩艘AUG中,AUG1的優(yōu)先級(jí)高于AUG2.在航行水深H=90m工況下的仿真結(jié)果如圖9所示.
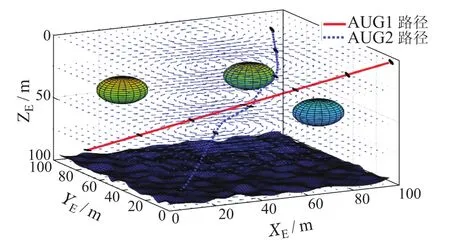
圖9 局部路徑規(guī)劃圖Fig.9 Local path planning diagram
由圖9可知,AUG1的路徑起點(diǎn)和終點(diǎn)分別為(10,90,90)和(90,10,10),AUG2的路徑起點(diǎn)和終點(diǎn)分別為(10,10,90)和(90,90,10),3個(gè)礙航物的坐標(biāo)和半徑分 別 為(10,60,30,10)、(90,50,60,10)和(70,70,35,10).從圖9中可以看出,當(dāng)兩AUG存在碰撞風(fēng)險(xiǎn)時(shí),在局部路徑協(xié)調(diào)作用下,優(yōu)先級(jí)較低的AUG2成功避開(kāi)了AUG1,并且有效避開(kāi)了水下礙航物,驗(yàn)證了所提方法的避碰和避障功能.
任務(wù)3:五艘AUG組成的集群在目標(biāo)區(qū)域進(jìn)行海洋作業(yè),采用所提雙層協(xié)調(diào)三維路徑規(guī)劃方法,根據(jù)時(shí)間最優(yōu)原則進(jìn)行路徑規(guī)劃.五艘AUG中,優(yōu)先級(jí)從高到底依次為AUG1,AUG2,···,AUG5.在航行深度H=80m工況下的仿真結(jié)果如圖10所示.
由圖10可知,AUG1的起點(diǎn)和終點(diǎn)分別為(100,150,0)和(900,850,0),AUG2的起點(diǎn)和終點(diǎn)分別為(100,200,0)和(900,900,0),AUG3的起點(diǎn)和終點(diǎn)分別為(100,100,0)和(900,800,0),AUG4的起點(diǎn)和終點(diǎn)分別為(100,250,0)和(900,950,0),AUG5的起點(diǎn)和終點(diǎn)分別為(100,50,0)和(900,750,0).如圖10所示,規(guī)劃的五組路徑都能夠?qū)崿F(xiàn)水下復(fù)雜地形的避障,并可以實(shí)現(xiàn)AUG之間的避碰功能,滿(mǎn)足AUG的路徑規(guī)劃需求.其中,五艘AUG航行時(shí)間如表3所示.
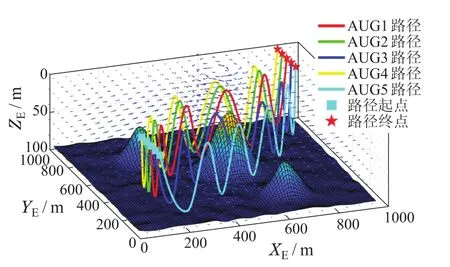
圖10 多AUG時(shí)間最優(yōu)規(guī)劃路徑三維圖Fig.10 3D diagram of time-optimal planning paths of AUGs
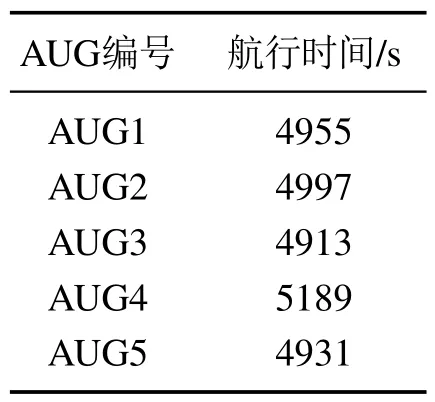
表3 AUG航行時(shí)間Table 3 AUG sailing time
將任務(wù)3中規(guī)劃的5條路徑進(jìn)行參數(shù)化處理[28],所得滿(mǎn)足欠驅(qū)動(dòng)圓碟形AUG跟蹤需求的參數(shù)化路徑見(jiàn)附錄.
5 結(jié)論
本文研究了海流干擾和水下礙航物影響下多圓碟形AUG的三維路徑規(guī)劃問(wèn)題.提出了適用于多圓碟形AUG路徑規(guī)劃的雙層協(xié)調(diào)結(jié)構(gòu),建立了適用于AUG的航行時(shí)間模型,為路徑規(guī)劃設(shè)置了合理的優(yōu)化目標(biāo).在全局規(guī)劃層采用QAPSO方法實(shí)現(xiàn)了多AUG的全局路徑規(guī)劃,在局部規(guī)劃層采用APF方法生成了靈活避碰的局部路徑,滿(mǎn)足了AUG集群開(kāi)展三維海洋觀測(cè)的路徑規(guī)劃需求.仿真結(jié)果驗(yàn)證了所提基于雙層協(xié)調(diào)結(jié)構(gòu)的多圓碟形AUG三維路徑規(guī)劃方法的有效性.在未來(lái)工作中,將研究基于規(guī)劃路徑的AUG協(xié)同路徑跟蹤控制問(wèn)題.
附錄
任務(wù)3中規(guī)劃的滿(mǎn)足圓碟形AUG跟蹤需求的5條參數(shù)化路徑如下所示:
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
中國(guó)工程咨詢(xún)(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
