
龍門氣象·第二回山水畫創(chuàng)作展作品
2016-08-22 01:48:12
國畫家 2016年4期

唐輝 浩氣千秋244cm×122cm 紙本 2015年

上:張桐太行山上145cm×368cm 紙本 2014年

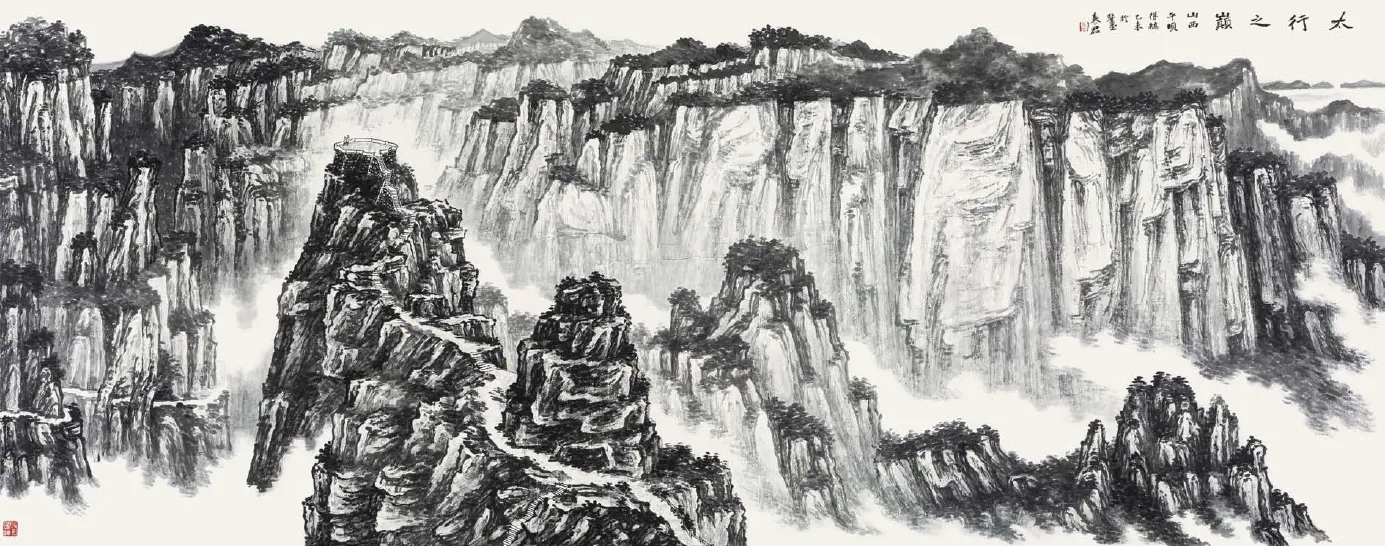
下:袁學(xué)君 太行之巔145cm×368cm 紙本 2015年

陳一耕 太行秋韻圖248cm×62cm×4 紙本 2014年

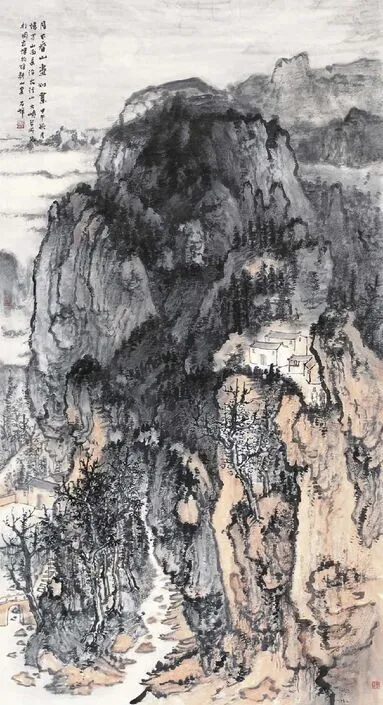
李曉松 太行深處180cm×90cm 紙本 2014年
石峰 看山如畫245cm×124cm紙本 2014年
猜你喜歡
少男少女·校園(2022年11期)2022-05-30 18:19:27
中國典型病例大全(2022年12期)2022-05-13 14:57:02
藝術(shù)品鑒(2022年6期)2022-04-14 02:39:44
寶藏(2021年10期)2021-11-22 07:30:30
河北畫報(2021年12期)2021-09-09 08:15:00
國畫家(2019年4期)2019-10-14 05:50:20
國畫家(2018年2期)2018-04-25 06:39:20
寶藏(2017年7期)2017-08-09 08:15:17
湖北大學(xué)學(xué)報(哲學(xué)社會科學(xué)版)(2017年3期)2017-05-12 12:07:46
小雪花·初中高分作文(2015年11期)2015-12-23 03:15:47
