
Error modeling and analysis of inclinometer based on digital accelerometer
2013-12-20 07:22:15BAIZhuquan白渚銓ZHANGXiaoming張曉明LIUJun
關(guān)鍵詞:張曉明
BAI Zhu-quan (白渚銓), ZHANG Xiao-ming (張曉明), LIU Jun (劉 俊)
(1. Key Laboratory of Instrumentation Science & Dynamic Measurement (North University of China), Ministry of Education, Taiyuan 030051, China; 2. Department of Electronic Science and Technology, North University of China, Taiyuan 030051, China)
Error modeling and analysis of inclinometer based on digital accelerometer
BAI Zhu-quan (白渚銓)1,2, ZHANG Xiao-ming (張曉明)1,2, LIU Jun (劉 俊)1,2
(1. Key Laboratory of Instrumentation Science & Dynamic Measurement (North University of China), Ministry of Education, Taiyuan 030051, China; 2. Department of Electronic Science and Technology, North University of China, Taiyuan 030051, China)
Measuring accuracy of inclinometer based on accelerometer is mainly influenced by the adopted accelerometer sensor. To improve the measuring accuracy of the inclinometer, the structure of the measuring system is given and measuring principle is analyzed, and the error model is established in this paper. Furthermore, the model is verified by simulation and experiment, which not only gives the smallest errors of the measured pitch and roll, but also lays foundation for sensor selection, error analysis and error compensation. The results show that the error model is of practical value.
inclinometer; accelerometer; error modeling; error analysis
CLD number: TM930.1 Document code: A
An inclinometer is an instrument for measuring the angles of scope or depression of an object with respect to gravity, including simple pendulum inclinometer, gyroscope inclinometer, inclinometer based on accelerometer, etc. The simple pendulum inclinometer has complex construction, hard manufacturing technology, small measure range, bad transient response and slow stable speed[1-4]. High accuracy gyroscope inclinometer has high measuring accuracy, but the error will accumulate with time and its price is high. Compared with the above two kinds of inclinometers, the inclinometer based on accelerometer has such advantages as all-weather, small interference and high accuracy, so it is widely used to measure the slope angles in practical applications.
The inclinometer based on accelerometer has high measuring accuracy, but the error of acceleration sensor will influence measuring accuracy of the inclinometer. To study the effect of acceleration sensor's measuring error on measuring accuracy of the inclinometer, error analysis of inclinometer is needed. On the basis of error sources analysis, the error model is established, and then it is simulated by Matlab and verified through experiment finally.
1 Structure and measuring principle of inclinometer
The inclinometer discussed in this paper consists of triaxial accelerometer, A/D converter, microctroller unit (MCU) and output interface, as shown in Fig.1.

Fig.1 Composition of inclinometer based on accelerometer
The gravitational field around the earth has characteristics such as all-weather, constant orientation and small variation, which makes it possible to measure the inclination of the object in it. Thus, the navigation coordinate system o-ned (n coordinate system) and body coordinate system ob-xbybzb(b coordinate system) are defined, as shown in Fig.2.
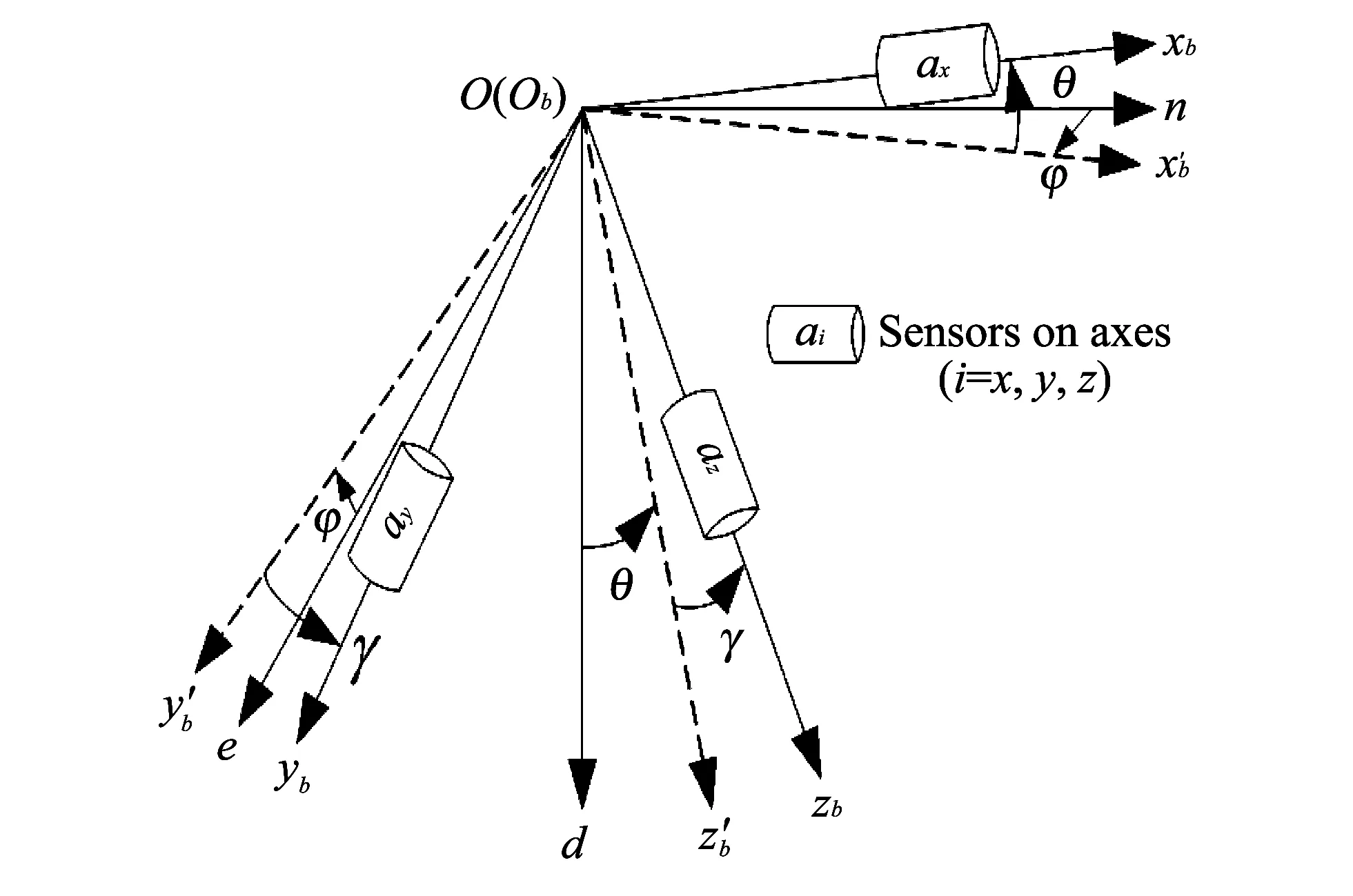
Fig.2 Sensors installation and definition of navigation coordinate system
where
The relationship between measuring values ax, ay, azobtained by sensors and gravitional acceleration g in n coordinate system is given as
The pitch θ and roll φ can be solved from Eq.(2), their expressions are
The above two equations show the basic measuring principle of inclination based on accelerometers. The inclination can be got when the accelerometers' measuring values are taken into the equations. It can also be seen that accuracy of the inclinometer is influenced by the measuring error of the sensors.
2 Inclinometer error modeling
From Eq.(3) and Eq.(4), it can be known that inclinometer error mainly results from the measuring error of acceleration sensors. The errors of pitch θ and roll γ can be deduced by Taylor formula as
where Δax, Δayand Δazare measuring errors of the sensor on the axes, respectively; θ0and γ0are the real values of pitch and roll; Δθ and Δγ are measuring errors of pitch and roll.
Accelerometer error Δa obeys normal distribution with parameters μ and σ, where μ is sensor's zero bias error and σ is standard deviation of random error.
Δa~N(μ,σ2).
Suppose the errors of x axis, y axis and z axis are mutually independent, Δθ and Δγ will obey the following statistical laws.
where σ(Δax), σ(Δay) and σ(Δaz) are standard deviations of measuring errors on x axis, y axis and z axis. Δθ is pitch error and Δγ is roll error. As the selected sensors are the same type, Δayand Δazare considered the same value approximately.
The mathematical expectations and standard deviations of Δθ and Δγ are deduced by statistical methods as
From error model of the inclinometer, it can be seen that pitch error is related to the measured pitch, and roll error is related to the measured pitch and roll.
3 Error model simulation and analysis
We suppose the accelerometer's error Δa obeys the following statistical law. According to the above four statistical formulae, the measuring errors and standard deviation variation tendency of pitch and roll are simulated.
Δa~N(0.012 gn, 0.001 gn).
3.1 Pitch error simulation
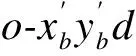
According to Eqs.(7) and (9), the change tendencies of error and standard deviation are simulated when pitch ranges from -60° to 60°, as shown in Fig.3 and Fig.4, respectively.
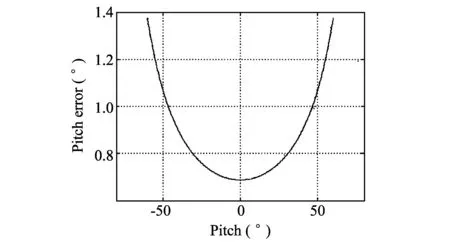
Fig.3 Pitch error curve
By analysis of Eq.(7) and (9) and by observation of Fig.3 and Fig.4, it can be seen that error and standard deviation of pitch are related to the measured pitch, and they increase with the increase of absolute value of pitch.
Fig.4 Pitch standard deviation curve
3.2 Roll error simulation
Figs.5 and 6 show the error and standard devication of roll after simulation.
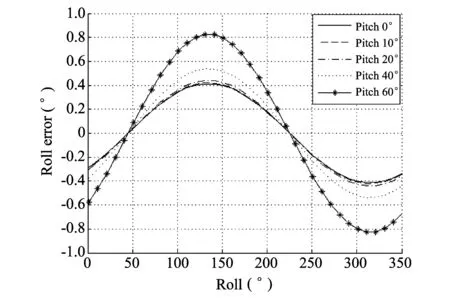
Fig.5 Mathematical expectation of roll error under different pitches
It can be seen from Fig.5 that mathematical expectation of roll error is related to the measured pitch and roll. Roll error changes like a sine curve when pitch is invariable. The smallest values are got at 45° and 225°, and the biggest values appear at 135° and 315°. On condition that there exists the same roll, roll error increases with the increase of pitch.
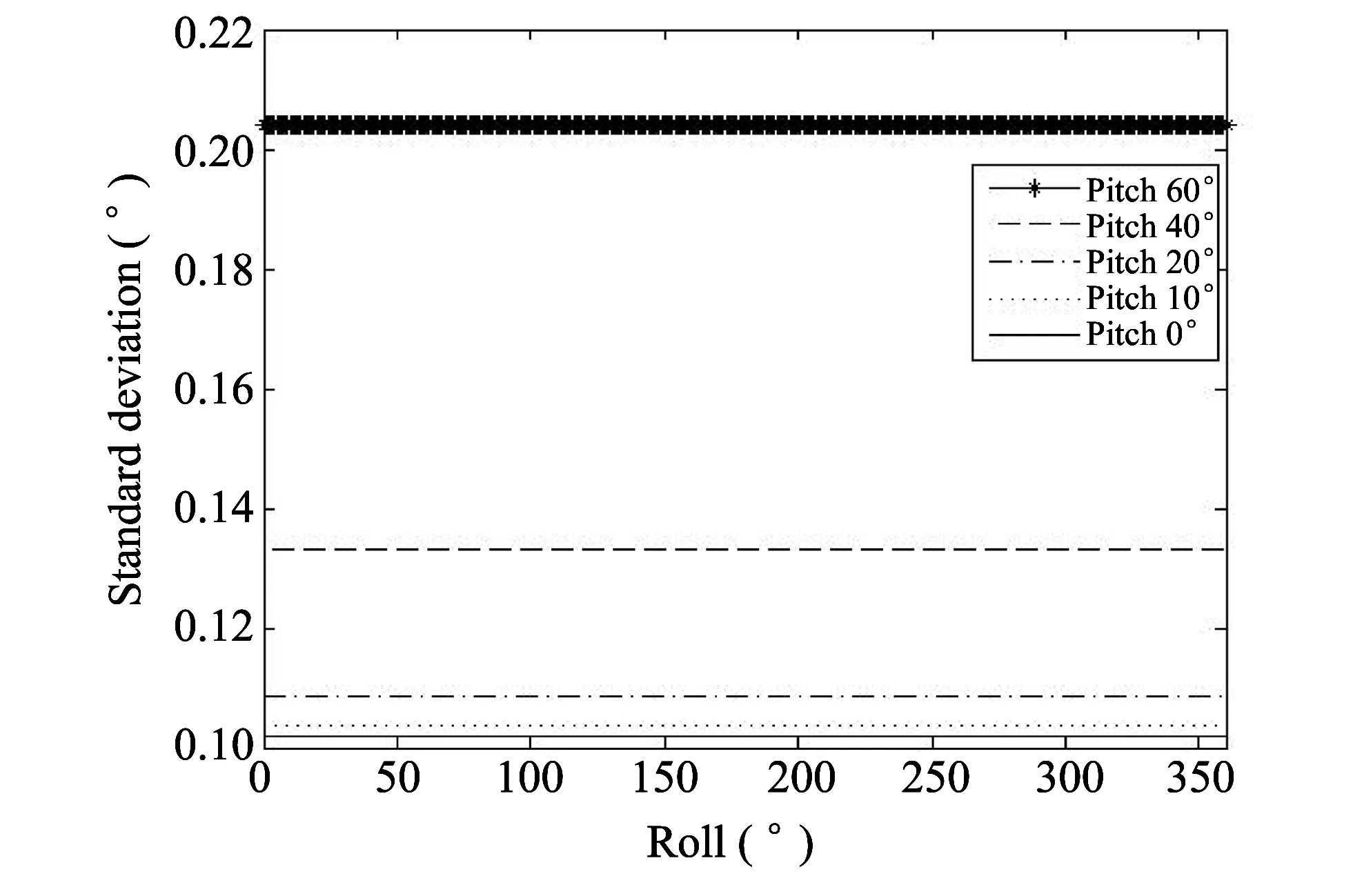
Fig.6 Standard deviation of roll error's under different pitches
It can be seen from Eq.(10) and Fig.6, standard deviation of roll error is independent of roll itself. When pitch is invariable, standard deviation curve may be a horizontal line, and its value has relation to pitch.
4 Experiment
Through the triaxial position turntable experiment, the established error model are verified. ADXL325 triaxial accelerometer is used as the acceleration sensors, whose range is ±6 gn, and the noise level of the inclinometer output is ±250 μgn.
4.1 Pitch experiment
Roll stays at 0° during the experiment, pitch ranges from -80° to 80°, each time increasing 10°. By comparing the pitches of turntable with the pitches solved by the inclinometer, the pitch error curve and standard deviation curve are drawn, as shown in Fig.7.

Fig.7 Pitch error curve and standard deviation curve
From the curves we can see that error increases while the pitch increasing, the variation tendency is basically the same as the simulation result, but the error values have some bias. Standard deviation has big error while pitch ranges from -50° to 50°.
4.2 Roll experiment
The pitch are set 0°, 10°, 20°, 40° and 60°, and roll rotates from 0° to 360° for each pitch, increaing 10° one time. Comparing the solved results and simulation results, the error and standard deviation are calculated, as shown in Fig.8 and Fig.9.
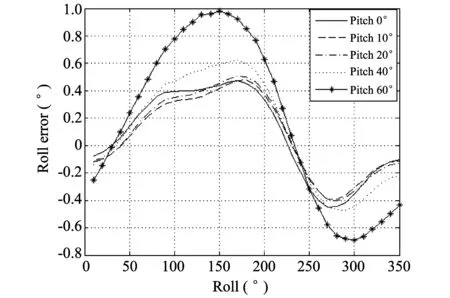
Fig.8 Roll error curves

Fig.9 Roll error standard deviation curves
According to the comparison between experiment results and simulation results, it can be seen that experiment results have the same change tendency with simulation results. But the former have bigger error values, especially when pitch is greater that 60°, roll error standard deviations are entirely 0.5° higher than those of the simulation results.
The reasons may be noisy interference in environment, turntable accuracy, sensor's error and noise level. Simulation environment is perfect, so it get the perfect results.
5 Conclusion
The principle of inclinometer based on accelerometer is introduced in this paper, and system error sources are also analyzed. Measuring error's distribution law is provided by statistical law and is analyzed. The established mathematical model in this paper can be used to not only select sensors, but also calculate the sensor' error when the system error range is given. This model can give the credible range, which provides reference while choosing inclinometer with high accuracy range.
[1] TIAN Xiao-fang, LU Qing-yong, XIONG Chao. Design of inclinometer based on accelerometer sensors. Chinese Journal of Sensors and Actuators, 2006, 19(4): 361-363.
[2] WU Jun, ZHOU Wen-xiang, LEI Jin-e, et al. Design and relization of digital inclinometer based on DSP. Computer Measurement and Control, 2009, 17(11): 2337-2338.
[3] SHA Cheng-xian, LI Jie, ZHAI Cheng-rui. Design of digital inclinometer based on MEMS acceleration sensor. Transducer and Microsystem Technologies, 2010, 29(6): 134-136.
[4] XU Xiao-qing, WANG Bao-guang, SU Chun-sheng. Study on subminature digital based on MEMS sensor technology. Electronic Measurement Technology, 2008, 31(2): 177-178, 185.
date: 2013-07-30
BAI Zhu-quan (motorbai@163.com)
1674-8042(2013)04-0321-04
10.3969/j.issn.1674-8042.2013.04.004
猜你喜歡
青年文學(xué)家(2024年1期)2024-03-09 08:46:10
故事會(2022年16期)2022-08-22 01:39:20
心聲歌刊(2022年1期)2022-06-06 10:30:38
當(dāng)代作家(2021年11期)2021-12-17 22:51:26
房地產(chǎn)導(dǎo)刊(2021年8期)2021-10-13 07:35:16
房地產(chǎn)導(dǎo)刊(2020年11期)2020-12-28 01:32:48
房地產(chǎn)導(dǎo)刊(2020年8期)2020-09-11 07:48:10
遵義醫(yī)科大學(xué)學(xué)報(2014年1期)2014-08-09 01:29:38
Journal of Measurement Science and Instrumentation(2013年4期)2013-12-20 07:22:14
Journal of Measurement Science and Instrumentation(2013年3期)2013-11-01 02:07:48
 Journal of Measurement Science and Instrumentation2013年4期
Journal of Measurement Science and Instrumentation2013年4期
- Journal of Measurement Science and Instrumentation的其它文章
- A CAWL handler for context-aware composite workflow services
- Movement and behavior analysis using neural spike signals in CA1 of rat hippocampus
- Synthesis and cost estimation of ethylene oxide process using PRO/II
- Efficient model building in active appearance model for rotated face
- Preparation and characterization of TiO2-SiO2-Fe3O4 core-shell powders in nano scale
- Changes in hippocampal neural response by external reward